-
ros2 galactic仿真导航时,rviz中不显示代价地图
- ROS版本:ROS2 galactic
- 导航包:nav2
按照动手学ros2第11章第三节 (使用FishBot进行自主导航) 配置好后,rviz中能显示地图,也能导航,但是通过 “by/topic” 方式添加代价地图话题,提示 Warning "No map received",不能显示代价地图, 这是为什么啊?
这是launch文件
import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): #=============================1.定位到包的地址============================================================= fishbot_navigation2_dir = get_package_share_directory('robot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') #=============================2.声明参数,获取配置文件路径=================================================== # use_sim_time 这里要设置成true,因为gazebo是仿真环境,其时间是通过/clock话题获取,而不是系统时间 use_sim_time = LaunchConfiguration('use_sim_time', default='true') map_yaml_path = LaunchConfiguration('map',default=os.path.join(fishbot_navigation2_dir,'maps','fishbot_map.yaml')) nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(fishbot_navigation2_dir,'param','robot_nav2_params.yaml')) rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz') #=============================3.声明启动launch文件,传入:地图路径、是否使用仿真时间以及nav2参数文件============== nav2_bringup_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') return LaunchDescription([nav2_bringup_launch,rviz_node])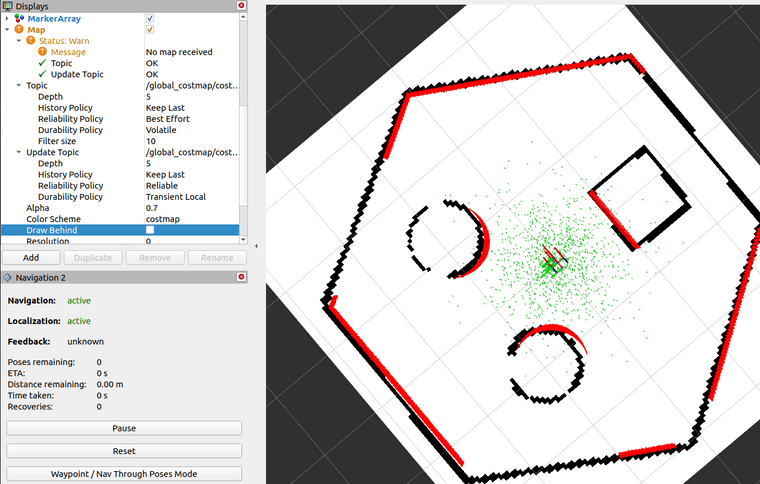
-
@slx 这个问题大概出在了数据来源端,仿真来说就是gazebo这一块,所以需要你贴下启动gazebo的launch文件,另外你的代码是直接下载的fishbot源码还是从教程中复制粘贴下来的?
-
@小鱼
代码是复制粘贴的,我自己也做了改动这是gazebo的启动launch
import os from launch import LaunchDescription from launch.actions import ExecuteProcess from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): robot_name_in_model = 'my_robot' package_name = 'robot_urdf' urdf_name = "my_robot.urdf" rviz_name = "my.rviz" world_name = "fishbot.world" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') gazebo_world_path = os.path.join(pkg_share, f'world/{world_name}') default_rviz_config_path = os.path.join(pkg_share, f'rviz/{rviz_name}') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', gazebo_world_path], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen') # Start Robot State publisher start_robot_state_publisher_cmd = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) # joint_state_publisher_node = Node( # package='joint_state_publisher_gui', # executable='joint_state_publisher_gui', # name='joint_state_publisher_gui', # arguments=[urdf_model_path] # ) # Launch RViz start_rviz_cmd = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', arguments=['-d', default_rviz_config_path] ) ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) ld.add_action(start_robot_state_publisher_cmd) # ld.add_action(joint_state_publisher_node) # ld.add_action(start_rviz_cmd) return ld -
@slx 在 rviz2中不显示代价地图 中说:
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', gazebo_world_path],
问题出在了这里,少加载了一个库,修改一下即可
原始启动gazebo代码
# Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', gazebo_world_path], output='screen')修改后的启动gazebo代码
# Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path], output='screen') -
可以了可以了 感谢
-
 小 小鱼 从 中的 动手学ROS2 移动了该主题
小 小鱼 从 中的 动手学ROS2 移动了该主题