MoveIt动态目标规划
-
对于机械臂运动,当构建轨迹方程完成,然后进行插补。在插补过程中目标改变,想要再次构建轨迹方程,
然后对新的轨迹方程进行插补,主要是想实现新旧轨迹方程的切换,请问怎么实现呢? -
@577478126 你是在机械臂运行过程中实时的插补,还是说先计算插补,然后想在已经计算的插补中新增一段轨迹,新的轨迹和原来的之间的位姿差距有多大?另外你是关节空间还是笛卡尔空间
-
@小鱼 鱼哥好,
1.是运行过程的实时插补,就是说本来的目标是会不规则运动的,所以要在运行过程中不断检测新的目标位姿并且变换轨迹。
2.位姿差距不是很大,大约是人的脑袋活动的范围。
3.是笛卡尔空间。
主要的问题是需要轨迹连接处位置、速度、加速度连续,也就是能合成一条完整的轨迹 -
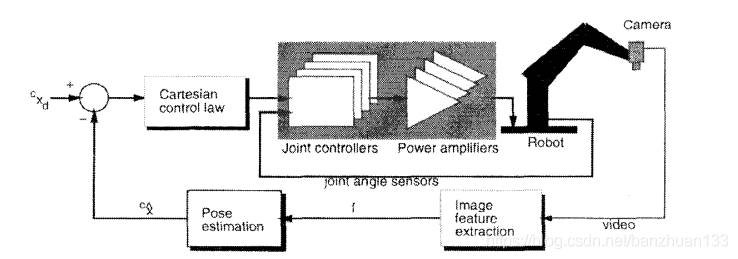
@577478126 那给我的感觉很像视觉伺服,你可以看看这篇文章: https://blog.csdn.net/banzhuan133/article/details/90723075