运行ls /dev/video*后, 报错无法访问'/dev/video*': 没有那个文件或目录
-
lz在做手眼标定,按照鱼香的https://gitee.com/ohhuo/handeye-calib这一教程来做。
但是遇到了如题所示的问题。
楼主使用的是海康相机,使用海康的MVS可以获取相机图像,但是在dev中没有设备,这样就没法继续推进了,有大佬知道是什么问题吗?
相机型号是:MV-CA050-12UC
MVS上调用情况如下图
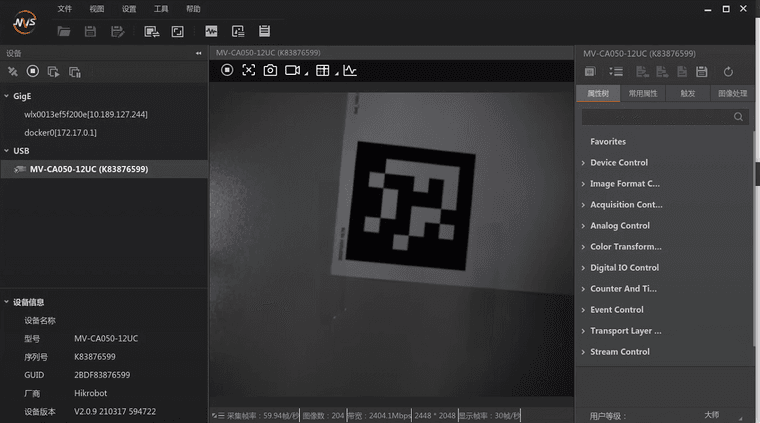
-
@1746812058 你这个应该是网口的相机吧,我之前用过海康的,他们的相机需要专门的驱动,你需要自己整一个,然后把话图像数据桥接给ROS,还挺麻烦的.
-
@小鱼 感谢回答,是usb相机,需要短期实现,这样太麻烦了,暂时放弃在线做手眼标定了,还是采用离线的方式吧
-
@1746812058 使用海康的sdk获取到相机图像,然后再按照内置的Image格式发布出来就行。其他就和正常的标定一样了