
在未使用IMU 数据时,可以成功建图,但是在fishbot_2d.lua 文件中开启使用IMU数据之后无法接收到地图:
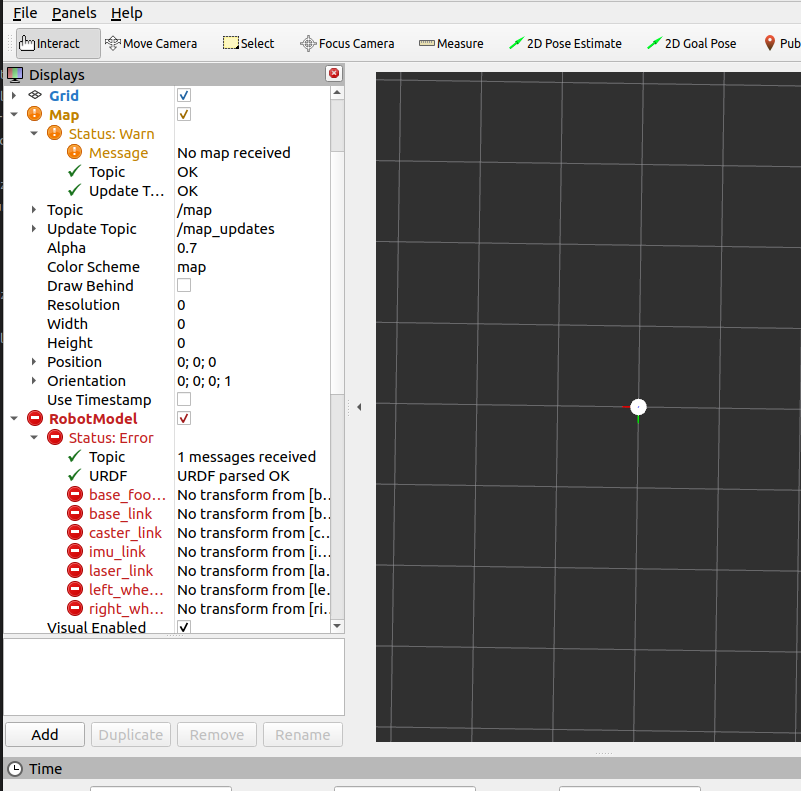
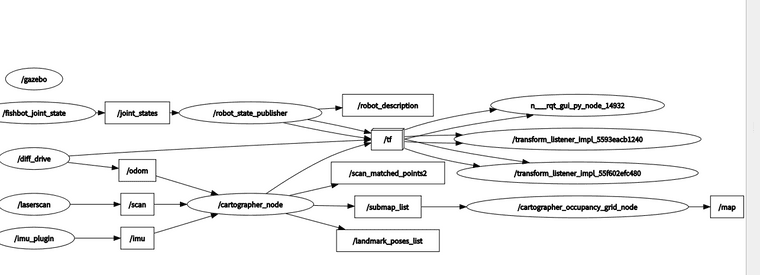
topic monitor中/submap_list 话题显示 can not get message class for type "cartographer_ros_msgs/msg?SubmapList",有点无从下手...查阅资料有人使用 robot_localization 进行imu 和odom 的融合,是不是必须要用这个包才能同时融入,imu和odom.
Plus, 关闭使用差速模型输出的odom,只使用IMU 数据也不行