求助,源码安装cartographer出错
-
在源码下载cartographer时出现错误
-
@小鱼 鱼哥鱼哥求助
-
@3568485143 ros2装了吗,先用下rosdepc装下依赖
-
@小鱼 ros2安装了,rosdepc也装了,然后在cartographer安装环节执行
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
时出现以下错误:
欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [bionic]
cartographer_ros: Cannot locate rosdep definition for [rosbag2_storage]
cartographer_rviz: [libabsl-dev] defined as "not available" for OS version [bionic]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully如果在使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,最后加入QQ交流群 686914208(入群口令:一键安装)
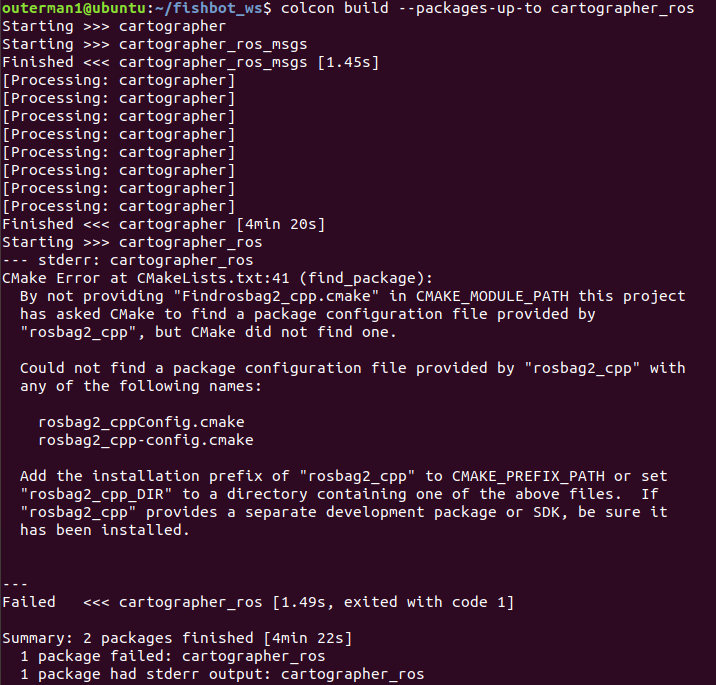
最后在执行colcon build --packages-up-to cartographer_ros环节时出现以下错误:
outerman1@ubuntu:~/fishbot_ws$ colcon build --packages-up-to cartographer_ros
Starting >>> cartographer
Starting >>> cartographer_ros_msgs
Finished <<< cartographer_ros_msgs [2.34s]
Finished <<< cartographer [4.44s]
Starting >>> cartographer_ros
--- stderr: cartographer_ros
CMake Error at CMakeLists.txt:41 (find_package):
By not providing "Findrosbag2_cpp.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"rosbag2_cpp", but CMake did not find one.Could not find a package configuration file provided by "rosbag2_cpp" with
any of the following names:rosbag2_cppConfig.cmake rosbag2_cpp-config.cmakeAdd the installation prefix of "rosbag2_cpp" to CMAKE_PREFIX_PATH or set
"rosbag2_cpp_DIR" to a directory containing one of the above files. If
"rosbag2_cpp" provides a separate development package or SDK, be sure it
has been installed.
Failed <<< cartographer_ros [0.46s, exited with code 1]
Summary: 2 packages finished [5.13s]
1 package failed: cartographer_ros
1 package had stderr output: cartographer_ros请问怎么解决,感谢!
-
-
@小鱼 ros2版本是eloquent,ubuntu版本是18.04。ros2安装了,rosdepc也装了。根据《动手学ros2》中进行cartographer的源码安装,报错如下:
1.使用rosdepc安装所需依赖:
rosdepc install -r --from-paths src --ignore-src --rosdistro $ROS_DISTRO -y
时出现以下错误:欢迎使用国内版rosdep之rosdepc,我是作者小鱼!
欢迎关注公众号《鱼香ROS》加入交流群
小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
cartographer: [libabsl-dev] defined as "not available" for OS version [bionic]
cartographer_ros: Cannot locate rosdep definition for [rosbag2_storage]
cartographer_rviz: [libabsl-dev] defined as "not available" for OS version [bionic]
Continuing to install resolvable dependencies...
#All required rosdeps installed successfully
如果在使用过程中遇到任何问题,欢迎通过fishros.org.cn反馈,最后加入QQ交流群 686914208(入群口令:一键安装)2.跳过1中的错误,直接在执行编译环节
colcon build --packages-up-to cartographer_ros
时出现以下错误:outerman1@ubuntu:~/fishbot_ws$ colcon build --packages-up-to cartographer_ros
Starting >>> cartographer
Starting >>> cartographer_ros_msgs
Finished <<< cartographer_ros_msgs [2.34s]
Finished <<< cartographer [4.44s]
Starting >>> cartographer_ros
--- stderr: cartographer_ros
CMake Error at CMakeLists.txt:41 (find_package):
By not providing "Findrosbag2_cpp.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"rosbag2_cpp", but CMake did not find one.
Could not find a package configuration file provided by "rosbag2_cpp" with
any of the following names:
rosbag2_cppConfig.cmake
rosbag2_cpp-config.cmake
Add the installation prefix of "rosbag2_cpp" to CMAKE_PREFIX_PATH or set
"rosbag2_cpp_DIR" to a directory containing one of the above files. If
"rosbag2_cpp" provides a separate development package or SDK, be sure it
has been installed.
Failed <<< cartographer_ros [0.46s, exited with code 1]
Summary: 2 packages finished [5.13s]
1 package failed: cartographer_ros
1 package had stderr output: cartographer_ros请问怎么解决,感谢!
-
@3568485143 版本太老了