源码安装moveit之后,运行自己机械臂的moveit demo出错
-
Moveit1安装官方文档
以上是moveit源码安装的官方文档,我按照官方给的安装教程源码安装了moveit1,然后用官方给的panda机械臂的moveit!demo运行了下面命令:roslaunch panda_moveit_config demo.launch发现可以正常显示panda机械臂的模型:
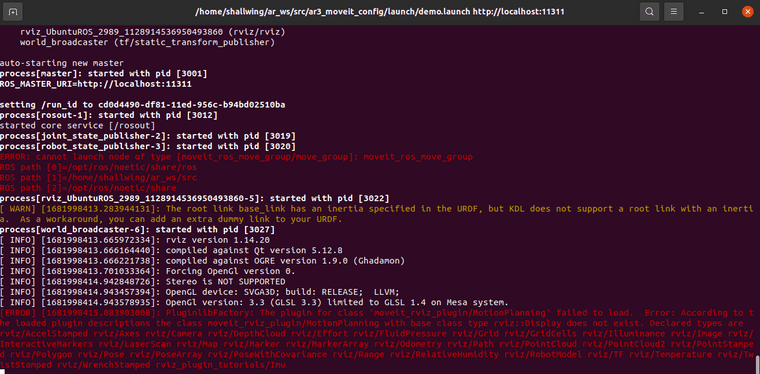
接着,我直接用了我机械臂的moveit中的demo去运行,结果报了这个错误:
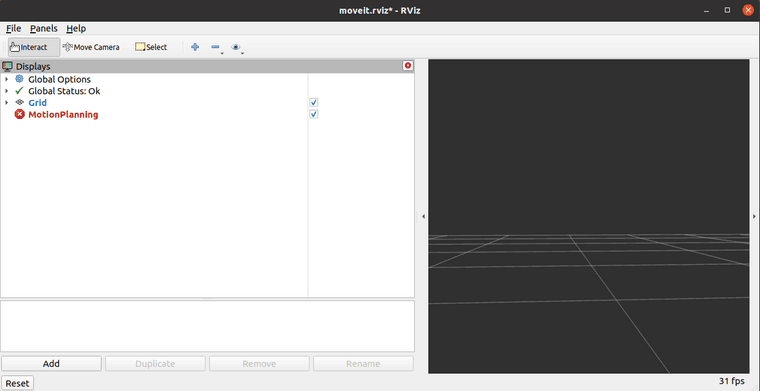
还有rviz中显示是这样的:
我的机械臂的ROS代码在下面的链接中:
源行ar4机械臂ROS源码(兼容ar3与ar4)运行ar4 moveit demo的命令是这个:
roslaunch ar3_moveit_config demo.launch在使用二进制安装的moveit时,ar4的moveit!demo是可以正常运行的,但是源码安装的情况下却是这样,我很不解,请求各位大佬帮助,谢谢
-
@413372595 源码版本可能不对
-
@小鱼 在 源码安装moveit之后,运行自己机械臂的moveit demo出错 中说:
源码版本可能不对
大佬,那如何下载正确版本的moveit和ompl的源码呢,能给一个建议的版本吗,我怀疑是我在git克隆代码的时候,没有克隆到正确版本的分支上
-
@413372595 好久没用过moveit1了,看报错,感觉缺少了moveit_ros_move_group ,你可以尝试用 apt 安装下。
-
@小鱼 在 源码安装moveit之后,运行自己机械臂的moveit demo出错 中说:
好久没用过moveit1了,看报错,感觉缺少了moveit_ros_move_group ,你可以尝试用 apt 安装下。
这样安装之后,还能在moveit中加入自己的路径规划算法吗
-
@413372595 那推荐你从源码安装
-
@小鱼 谢谢大佬,源码安装的问题我自己解决了,准确来说我不是在源码安装上有问题,而是在源码安装之后不知道怎么用源码安装的moveit去控制自己机械臂的问题。后来通过别人了解到,源码安装moveit之后,需要自己再去把URDF模型导入一边,生成对应的config和launch文件,这样才能行,所以我现在又引申出了另一个问题,就是如何让导入URDF生成的launch文件,去控制真实的自己的机械臂。
-
@413372595 在 源码安装moveit之后,运行自己机械臂的moveit demo出错 中说:
是如何让导入URDF生成的launch文件,去控制真实的自己的机械臂。
搜搜,网上有很多,moveit1的很方便
-
@小鱼 嗯,已经成功导入了。现在就有一个问题,我最初拿到的代码,它里面的urdf导入的是二进制安装的moveit,而我现在导入到了源码安装的moveit并生成了对应的moveit_config功能包,那么这时如果要控制真实的机械臂,应该重写去写它对应的launch文件吧
-
@413372595 改好了吗
-
老哥,能不能给个联系方式,我也遇到这个问题了