rviz2加载不出保存的yaml地图文件
-
@小鱼 按照第10章slam建图的ros2地图加载教程一步步来,但是无法在rviz2中加载出地图来,找不到map话题 -
@927348581 原来的终端目录,cd ..之后再运行,你看看指令哈,最后文件的路径是map/fishbot_map.yaml 是上一级别。
另外:@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
-
输入的终端命令:
x-ros2@x-ros2-virtual:~/fishbot_ws/src/fishbot_cartographer$ ros2 run nav2_map_server map_server --ros-args --param yaml_filename:=map/fishbot_map.yaml
显示:[INFO] [1692927141.177778089] [map_server]:
map_server lifecycle node launched.
Waiting on external lifecycle transitions to activate
See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [1692927141.177900592] [map_server]: Creating
[INFO] [1692927178.856735398] [map_server]: Configuring
[INFO] [map_io]: Loading yaml file: map/fishbot_map.yaml
[DEBUG] [map_io]: resolution: 0.05
[DEBUG] [map_io]: origin[0]: -10
[DEBUG] [map_io]: origin[1]: -12.4
[DEBUG] [map_io]: origin[2]: 0
[DEBUG] [map_io]: free_thresh: 0.25
[DEBUG] [map_io]: occupied_thresh: 0.65
[DEBUG] [map_io]: mode: trinary开启新的终端输入的命令:rviz2
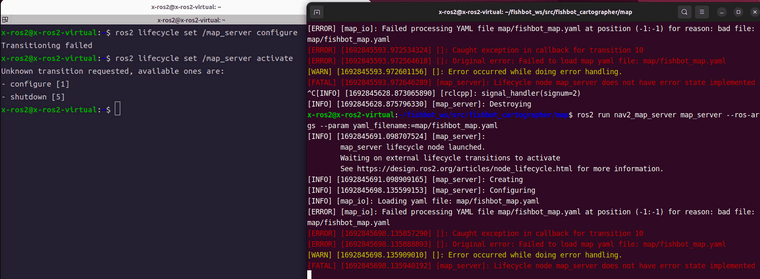
ros2 lifecycle set /map_server configure
ros2 lifecycle set /map_server activate
显示:Transitioning successful
但是rviz2上map组件那里呈现黄色感叹号,Message 显示 no map received
rviz2依旧没有地图显示 -