使用slam_toolbox建图时候出现的问题
-
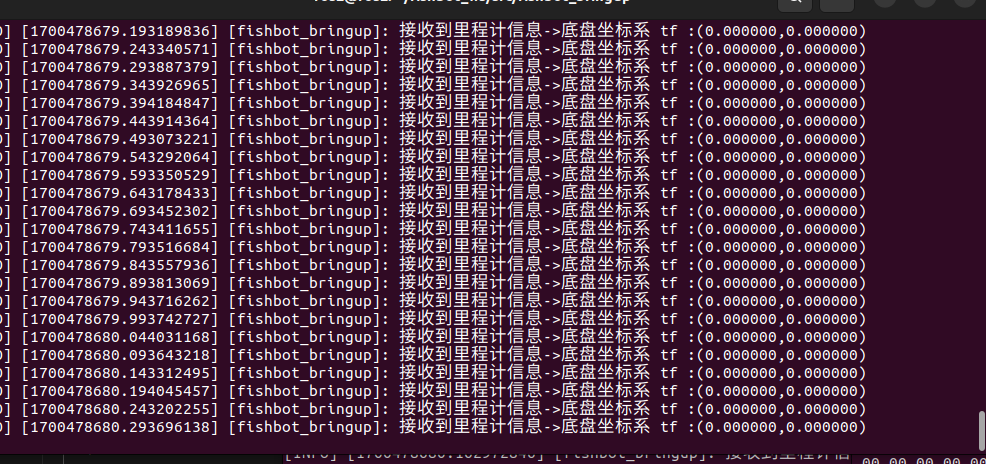
如题,这边在进行建图的时候执行命令一直在刷错误的日志
[async_slam_toolbox_node-1] [INFO] [1700478030.455096736] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.330 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1700478030.580651700] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.455 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1700478030.705320594] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.580 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1700478030.830646019] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.705 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1700478030.955252392] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.830 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1700478031.080491511] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1700478030.955 for reason 'discarding message because the queue is full'
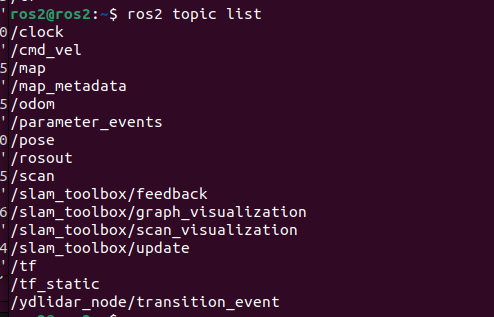
话题也能正常出现
然后打开rviz也没有出现地图
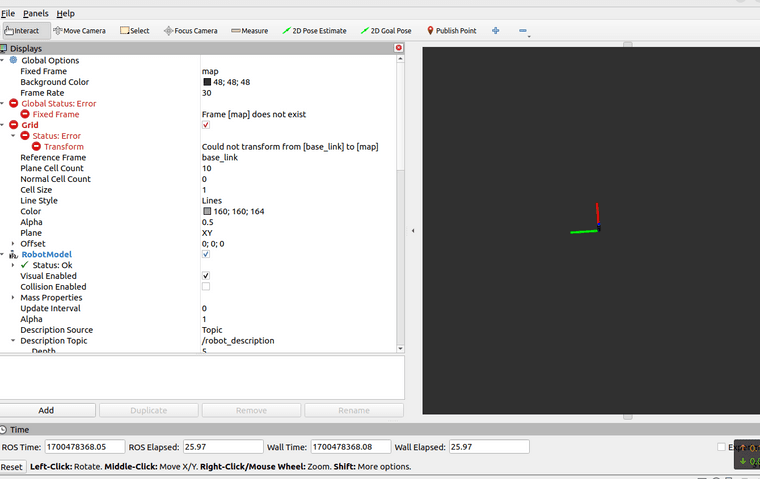
请问有遇到过类似情况的吗 雷达那些都是正常 就map的时候不正常这个是bringup的打印
求大神解答

-
-
@小鱼 已经处理好了 重新编译一下底盘代码就ok了
-
-
@1014535185 您好,我遇到了和您一样的问题,您最后重新编译底盘代码就好了么?为什么呢?单独编译底盘代码么?我的报错、topic list以及rviz显示和您一模一样,还望您有时间为我解答一下困惑
-
@liajun 我也是这个问题一模一样
-
@1363573994 我也是,本来以为虚拟机网络不好导致的,但是物理机试了还是一样的情况,毫无头绪
-
@1363573994 哪一个视频章节遇到的问题,该开的节点是否都开了
-
@小鱼 第九章最后两步,配置完bringup.launch.py以后,然后运行bringup.launch.py,我看了micro-ROS Agent也连上了,然后雷达的wifi也连上了,topic list也有map,然后echo map也有数据,就是rviz2显示no map receive
-
@1363573994 这个是rviz配置问题,看一下视频教程操作
-
@小鱼 charles@charles-VirtualBox:~/microros_ws/src/fishbot_navigation2/maps$ ros2 topic info /scan -v
Type: sensor_msgs/msg/LaserScanPublisher count: 1
Node name: ydlidar_node
Node namespace: /
Topic type: sensor_msgs/msg/LaserScan
Endpoint type: PUBLISHER
GID: 01.0f.2e.b3.0b.83.5c.28.00.00.00.00.00.00.12.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteSubscription count: 1
Node name: rviz
Node namespace: /
Topic type: sensor_msgs/msg/LaserScan
Endpoint type: SUBSCRIPTION
GID: 01.0f.2e.b3.53.83.7d.23.00.00.00.00.00.00.26.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite我检查了一下是一样的吧,这是info出的报文
-
@小鱼 charles@charles-VirtualBox:~/microros_ws$ ros2 topic info /map -v
Type: nav_msgs/msg/OccupancyGridPublisher count: 1
Node name: slam_toolbox
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: PUBLISHER
GID: 01.0f.2e.b3.6b.fc.c5.3b.00.00.01.00.00.00.18.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: TRANSIENT_LOCAL
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteSubscription count: 2
Node name: rviz
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: SUBSCRIPTION
GID: 01.0f.2e.b3.07.fe.ae.93.00.00.00.00.00.00.24.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteNode name: slam_toolbox
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: SUBSCRIPTION
GID: 01.0f.2e.b3.6b.fc.c5.3b.00.00.01.00.00.00.25.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite这个时启动完所有节点以后,然后启动slam-tool建图,再打开rviz2以后 info /map的报文,这里类型有点不一样,不知道是不是这个问题,然后echo /map没有数据,我网上也没有找到资料,鱼哥救救我
-
@1363573994 在 使用slam_toolbox建图时候出现的问题 中说:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: TRANSIENT_LOCAL可能是qos不兼容? 不过你 echo /map 没有数据很奇怪
