@小鱼 在 FishBot里程计和IMU传感器数据融合 中说:
ros2 run robot_localization ekf_node --ros-args --params-file /path/to/your/params/file.yaml
这边按照您的步骤执行发现没有执行成功,是什么原因吗

改成launch文件执行也没运行起来
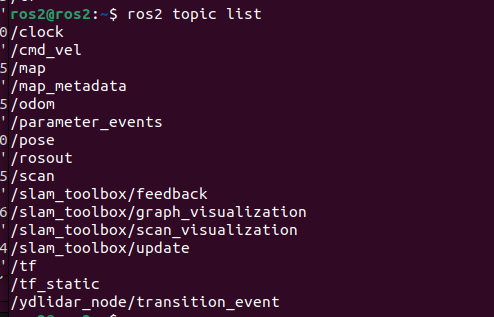
list一下好像也没有这个节点
然后用命令执行:
ros2 run robot_localization ekf_node --ros-args --params-file /opt/ros/humble/share/robot_localization/params/ekf_example.yaml
也是啥都没有 请问是什么情况吗