ros2 rviz2 laser_link可以显示雷达点云图,切换到odom坐标系就不能显示?
-
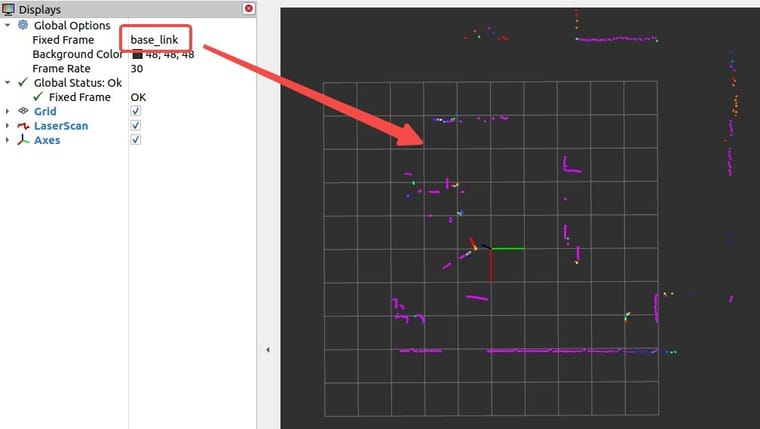
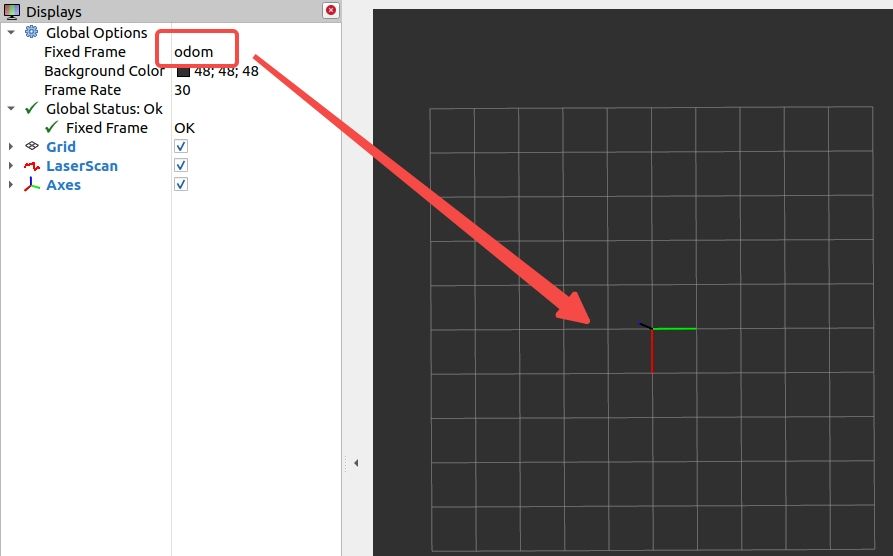
ros2 rviz2 laser_link可以显示雷达点云图,切换到odom坐标系就不行,是为什么?明明仿真可以。。。
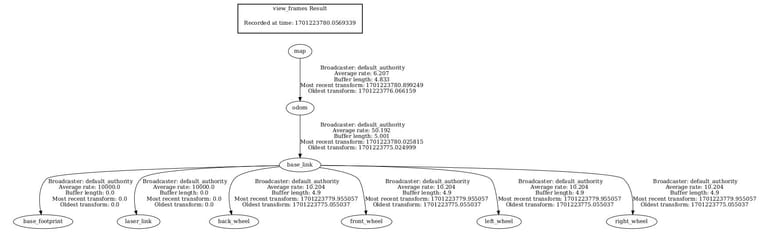
tf2坐标树也检查过了,laser_link->base_link,base_link -> odom.
rviz2 报错
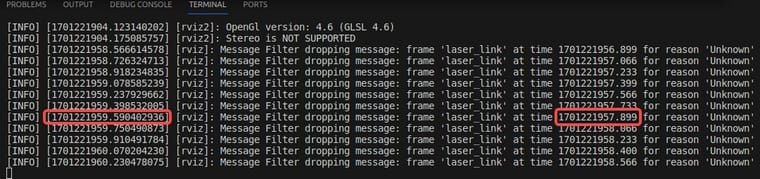
网上有的说是时间戳有问题,但是我排除了其他干扰因素,只在我发布laser的地方,发布了base_link -> odom的动态tf坐标和静态laser_link -> base_link,按理来讲,这时的时间戳都是一样的,但是还是不能再rviz2的odom坐标系显示雷达点云图。
然后我把base_link -> odom的动态tf坐标,改成了静态坐标就可以了。但是base_link -> odom就应该是动态的用法吧。所以我现在不知道该怎么办了......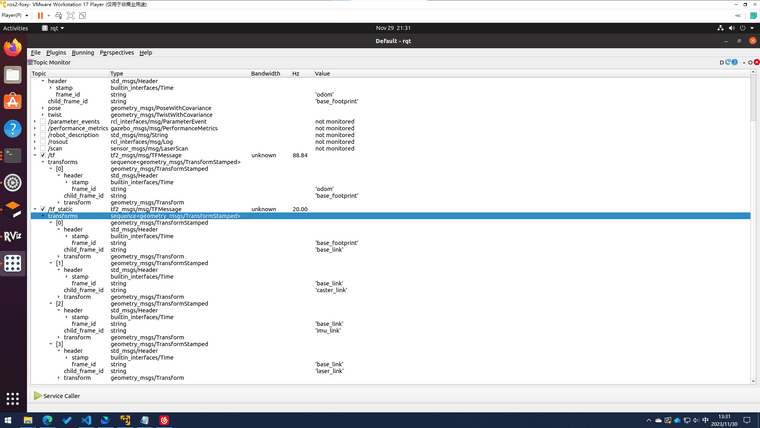
我用了仿真然后在rqt监控数据,base_link -> odom就是动态的... -
@1085519902 可以看下你的rviz 中 laserscan控件的配制参数是否合适