关于手眼标定的问题
-
各位前辈好,我想咨询一个问题,我学着小鱼老师的手眼标定方法标定jaka机械臂跟realsensed435相机,但是运行jaka节点的时候好像没有小鱼老师写的那个jaka_comuniate.launch文件该怎么办呀
-
@2279625101 这个后期应该被删掉了,直接找jaka运行ros驱动即可
-
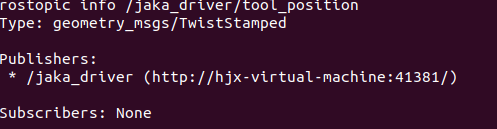
前辈,首先谢谢您的答复,我使用您的标定方法会出现这个问题,好像是机器人position格式是twist,但是需要的是pose格式的,导致我会卡在机器人位姿获取不到的情况,主要情况如下:


-
@2279625101 twist一般用于控制
-
@小鱼 好的,谢谢前辈,感谢