运行launch时找不到路径
-
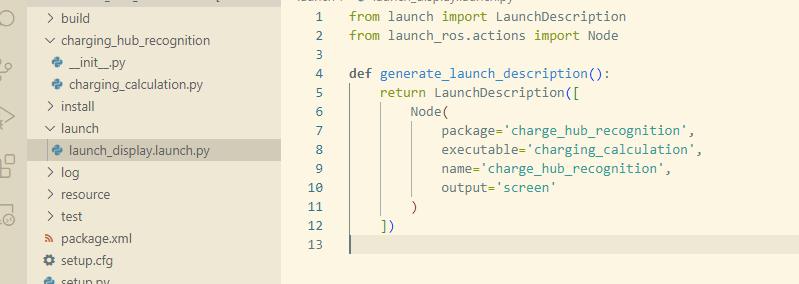
launch文件:
setup.py文件: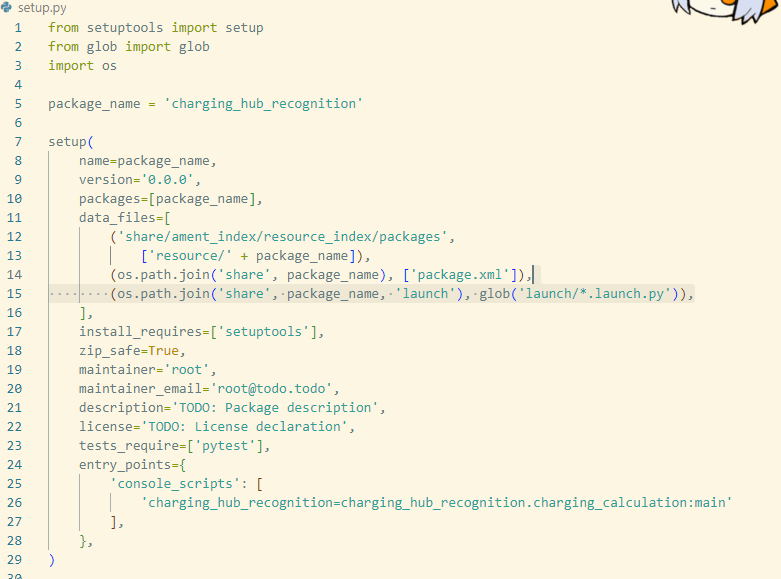
运行时报错ros2 launch charging_hub_recognition launch_display.launch.py

这个命令可以:ros2 run charging_hub_recognition charging_hub_recognition 运行,为什么?
用launch启动自己本身不可以吗? -
@yjjsnles 不要在功能包目录下进行build,需要先建立一个工作空间,把功能包放到src下,然后在工作空间下build 和 运行
注意格式:https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答