Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
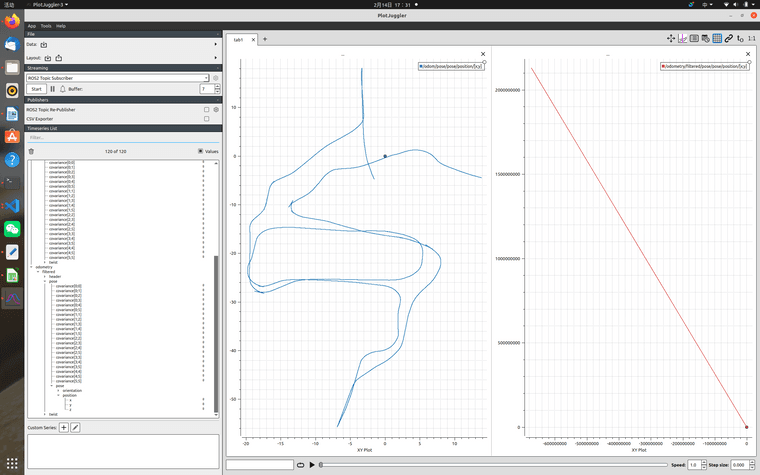
我用ros2的robot_localization融合里程计轨迹和imu得到的输出轨迹是一条斜线,这说明什么?
@1872311876 如果真实的小车走的是直线,这说明你融合的有问题
@小鱼
@小鱼 对比是这样的