rviz2显示不全关节,无转换关系报错
-
<robot name="demo03_joint"> <material name="yellow"> <color rgba="0.8 0.8 0.0 0.5"/> </material> <material name="red"> <color rgba="0.9 0.0 0.0 0.5"/> </material> <link name="base_link"> <visual> <geometry> <box size="0.5 0.3 0.1"/> </geometry> <material name="yellow"/> </visual> </link> <link name="camera"> <visual> <geometry> <box size="0.05 0.05 0.05"/> </geometry> <material name="red"/> </visual> </link> <joint name="camer2base" type="continuous"> <parent link="base_link"/> <child link="camera"/> <origin xyz="0.2 0.0 0.0"/> <axis xyz="0.0 0.0 1"/> </joint> </robot>rviz2-2] at line 93 in ./src/buffer_core.cpp [rviz2-2] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist [rviz2-2] at line 93 in ./src/buffer_core.cpp [rviz2-2] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist [rviz2-2] at line 93 in ./src/buffer_core.cpp [rviz2-2] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist [rviz2-2] at line 93 in ./src/buffer_core.cpp [rviz2-2] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist [rviz2-2] at line 93 in ./src/buffer_core.cpp [rviz2-2] Warning: Invalid frame ID "base_link" passed to canTransform argument target_frame - frame does not exist [rviz2-2] at line 93 in ./src/buffer_core.cpp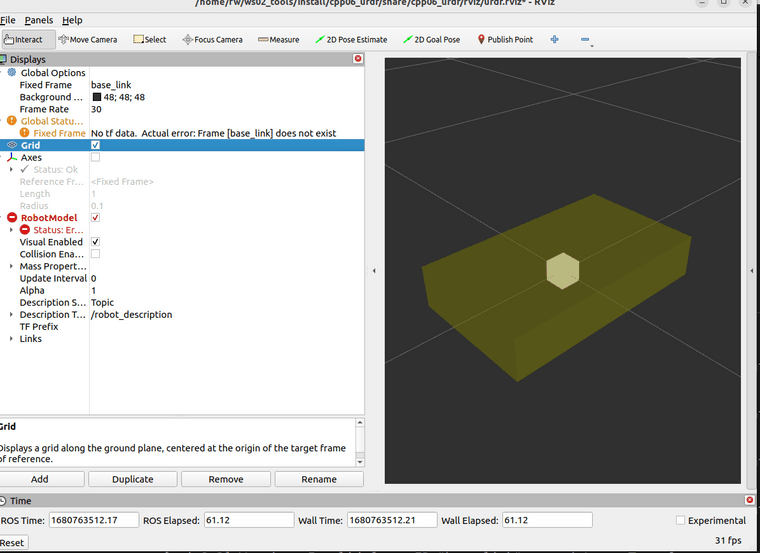
-
base_link主坐标系未定义