第九章运行gazrbo.launch报错,求助!!!
-
第九章运行gazrbo.launch报错,报错如下
ERROR] [spawn_entity.py-2]: process has died [pid 4631, exit code 1, cmd '/opt/ros/humble/lib/gazebo_ros/spawn_entity.py -entity fishbot -file /home/hdm/d2lros2/nav_ws/src/install/fishbot_description/share/fishbot_description/urdf/fishbot_gazebo.urdf --ros-args'].
urdf文件如下
<?xml version="1.0"?>
<robot name="fishbot"><!-- Robot Footprint -->
<link name="base_footprint"/><joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint><!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link><!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_link" />
<origin xyz="0 0 0.075" />
</joint><link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.02" />
</joint><link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="-0.02 0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="-0.02 -0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="caster_joint" type="fixed">
<parent link="base_link" />
<child link="caster_link" />
<origin xyz="0.06 0.0 -0.076" />
<axis xyz="0 1 0" />
</joint><gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<!-- <left_joint>left_wheel_joint</left_joint> -->
<!-- <right_joint>right_wheel_joint</right_joint> -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.065</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin><plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"> <ros> <remapping>~/out:=joint_states</remapping> </ros> <update_rate>30</update_rate> <joint_name>right_wheel_joint</joint_name> <joint_name>left_wheel_joint</joint_name> </plugin> </gazebo> <gazebo reference="laser_link"> <material>Gazebo/Black</material> </gazebo> <gazebo reference="imu_link"> <sensor name="imu_sensor" type="imu"> <plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"> <ros> <namespace>/</namespace> <remapping>~/out:=imu</remapping> </ros> <initial_orientation_as_reference>false</initial_orientation_as_reference> </plugin> <always_on>true</always_on> <update_rate>100</update_rate> <visualize>true</visualize> <imu> <angular_velocity> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </z> </angular_velocity> <linear_acceleration> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </z> </linear_acceleration> </imu> </sensor> </gazebo> <gazebo reference="laser_link"> <sensor name="laser_sensor" type="ray"> <always_on>true</always_on> <visualize>true</visualize> <update_rate>5</update_rate> <pose>0 0 0.075 0 0 0</pose> <ray> <scan> <horizontal> <samples>360</samples> <resolution>1.000000</resolution> <min_angle>0.000000</min_angle> <max_angle>6.280000</max_angle> </horizontal> </scan> <range> <min>0.120000</min> <max>3.5</max> <resolution>0.015000</resolution> </range> <noise> <type>gaussian</type> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray> <plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <!-- <namespace>/tb3</namespace> --> <remapping>~/out:=scan</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>laser_link</frame_name> </plugin> </sensor> </gazebo></robot>
gazebo.launch.py文件如下
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageSharedef generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen') ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) return ld求助!!!
-
@441755535 终端日志
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。 -
@小鱼 (base) hdm@hdm-virtual-machine:~/d2lros2/nav_ws$ colcon build --packages-select fishbot_description
Starting >>> fishbot_description
--- stderr: fishbot_description
/usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools.
warnings.warn(Finished <<< fishbot_description [4.20s]
Summary: 1 package finished [5.16s]
1 package had stderr output: fishbot_description
(base) hdm@hdm-virtual-machine:~/d2lros2/nav_ws$ source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
[INFO] [launch]: All log files can be found below /home/hdm/.ros/log/2023-05-14-23-35-03-743334-hdm-virtual-machine-4023
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [gazebo-1]: process started with pid [4053]
[INFO] [spawn_entity.py-2]: process started with pid [4055]
[spawn_entity.py-2] Traceback (most recent call last):
[spawn_entity.py-2] File "/opt/ros/humble/lib/gazebo_ros/spawn_entity.py", line 32, in <module>
[spawn_entity.py-2] import rclpy
[spawn_entity.py-2] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/init.py", line 49, in <module>
[spawn_entity.py-2] from rclpy.signals import install_signal_handlers
[spawn_entity.py-2] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/signals.py", line 15, in <module>
[spawn_entity.py-2] from rclpy.exceptions import InvalidHandle
[spawn_entity.py-2] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/exceptions.py", line 15, in <module>
[spawn_entity.py-2] from rclpy.impl.implementation_singleton import rclpy_implementation as _rclpy
[spawn_entity.py-2] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/impl/implementation_singleton.py", line 32, in <module>
[spawn_entity.py-2] rclpy_implementation = import_c_library('._rclpy_pybind11', package)
[spawn_entity.py-2] File "/opt/ros/humble/lib/python3.10/site-packages/rpyutils/import_c_library.py", line 39, in import_c_library
[spawn_entity.py-2] return importlib.import_module(name, package=package)
[spawn_entity.py-2] File "/home/hdm/miniconda3/lib/python3.8/importlib/init.py", line 127, in import_module
[spawn_entity.py-2] return _bootstrap._gcd_import(name[level:], package, level)
[spawn_entity.py-2] ModuleNotFoundError: No module named 'rclpy._rclpy_pybind11'
[spawn_entity.py-2] The C extension '/opt/ros/humble/lib/python3.10/site-packages/_rclpy_pybind11.cpython-38-x86_64-linux-gnu.so' isn't present on the system. Please refer to 'https://docs.ros.org/en/humble/Guides/Installation-Troubleshooting.html#import-failing-without-library-present-on-the-system' for possible solutions
[ERROR] [spawn_entity.py-2]: process has died [pid 4055, exit code 1, cmd '/opt/ros/humble/lib/gazebo_ros/spawn_entity.py -entity fishbot -file /home/hdm/d2lros2/nav_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_gazebo.urdf --ros-args'].
[gazebo-1] Gazebo multi-robot simulator, version 11.10.2
[gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation.
[gazebo-1] Released under the Apache 2 License.
[gazebo-1] http://gazebosim.org
[gazebo-1]
[gazebo-1] Gazebo multi-robot simulator, version 11.10.2
[gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation.
[gazebo-1] Released under the Apache 2 License.
[gazebo-1] http://gazebosim.org
[gazebo-1]
[gazebo-1] [Msg] Waiting for master.
[gazebo-1] [Msg] Connected to gazebo master @ http://127.0.0.1:11345
[gazebo-1] [Msg] Publicized address: 192.168.43.168
[gazebo-1] [Wrn] [GuiIface.cc:120] Could not find the Qt platform plugin "wayland" in ""
[gazebo-1] context mismatch in svga_surface_destroy
[gazebo-1] context mismatch in svga_surface_destroy -
@441755535 在 第九章运行gazrbo.launch报错,求助!!! 中说:
[spawn_entity.py-2] ModuleNotFoundError: No module named 'rclpy._rclpy_pybind11'
[spawn_entity.py-2] The C extension '/opt/ros/humble/lib/python3.10/site-packages/_rclpy_pybind11.cpython-38-x86_64-linux-gnu.so' isn't present on the system. Please refer to 'https://docs.ros.org/en/humble/Guides/Installation-Troubleshooting.html#import-failing-without-library-present-on-the-system' for possible solutions有没有conda,有的话退出来,另外
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
用代码块包裹下
-
@小鱼我在“第九章运行gazebo时,也遇到了相似的问题,无法显示模型,具体如下:
平台:虚拟机 Ubuntu20.04 ros:foxy
执行命令:
gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so
提示错误:
Gazebo multi-robot simulator, version 11.11.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[Msg] Waiting for master.
Gazebo multi-robot simulator, version 11.11.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.211.26
[Msg] Loading world file [/usr/share/gazebo-11/worlds/empty.world]
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.211.26
[Wrn] [Event.cc:61] Warning: Deleting a connection right after creation. Make sure to save the ConnectionPtr from a Connect call
context mismatch in svga_surface_destroy
context mismatch in svga_surface_destroy
[Wrn] [Publisher.cc:135] Queue limit reached for topic /gazebo/default/user_camera/pose, deleting message. This warning is printed only once.
Error [parser.cc:468] Error parsing XML from string: Error document empty.
[Err] [Model.cc:123] Error Code 23 Msg: FrameAttachedToGraph error, Non-LINK vertex with name [model] is disconnected; it should have 1 outgoing edge in MODEL attached_to graph.
[Err] [Model.cc:123] Error Code 23 Msg: Graph with model scope has sink vertex named [model] when starting from vertex with name [model], which is not permitted.在RQT中配置如下图:
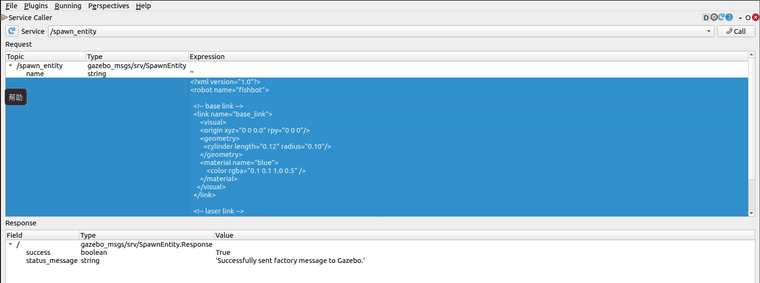
在RQT中提示成功,但是在gazebo中提示以上错误,且没有模型显示出来。 -
我也是这种错误,启动gazebo报错
nieao@nieao-vm:~$ gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so
Gazebo multi-robot simulator, version 11.10.2
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[Msg] Waiting for master.
Gazebo multi-robot simulator, version 11.10.2
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.247.128
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.247.128
[Msg] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[Msg] Loading world file [/usr/share/gazebo-11/worlds/empty.world]
[Wrn] [Publisher.cc:135] Queue limit reached for topic /gazebo/default/physics/contacts, deleting message. This warning is printed only once.
context mismatch in svga_surface_destroy
context mismatch in svga_surface_destroy
[Wrn] [Publisher.cc:135] Queue limit reached for topic /gazebo/default/user_camera/pose, deleting message. This warning is printed only once. -
@小鱼
我也是这种错误,启动gazebo报一下错误[Publisher.cc:135] Queue limit reached for topic /gazebo/default/physics/contacts, deleting message. This warning is printed only once
-vm:~$ gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so Gazebo multi-robot simulator, version 11.10.2 Copyright (C) 2012 Open Source Robotics Foundation. Released under the Apache 2 License. http://gazebosim.org [Msg] Waiting for master. Gazebo multi-robot simulator, version 11.10.2 Copyright (C) 2012 Open Source Robotics Foundation. Released under the Apache 2 License. http://gazebosim.org [Msg] Waiting for master. [Msg] Connected to gazebo master @ http://127.0.0.1:11345 [Msg] Publicized address: 192.168.247.128 [Msg] Connected to gazebo master @ http://127.0.0.1:11345 [Msg] Publicized address: 192.168.247.128 [Msg] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway. [Msg] Loading world file [/usr/share/gazebo-11/worlds/empty.world] [**Wrn] [Publisher.cc:135] Queue limit reached for topic /gazebo/default/physics/contacts, deleting message. This warning is printed only once.** context mismatch in svga_surface_destroy context mismatch in svga_surface_destroy **[Wrn] [Publisher.cc:135] Queue limit reached for topic /gazebo/default/user_camera/pose, deleting message. This warning is printed only once.**