环境:Ubuntu 22.04
ros2:humble
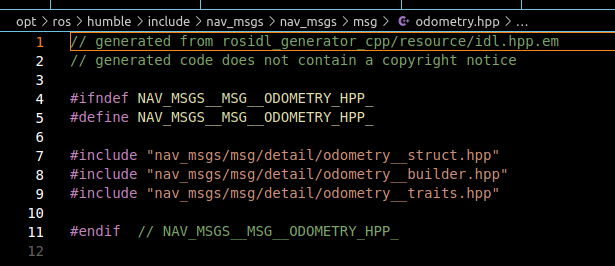
报错找不到以下头文件:


1、按CTRL+左键可以跳转到对应的.h文件,如下:
2、在配置中添加了文件的路径,如下:
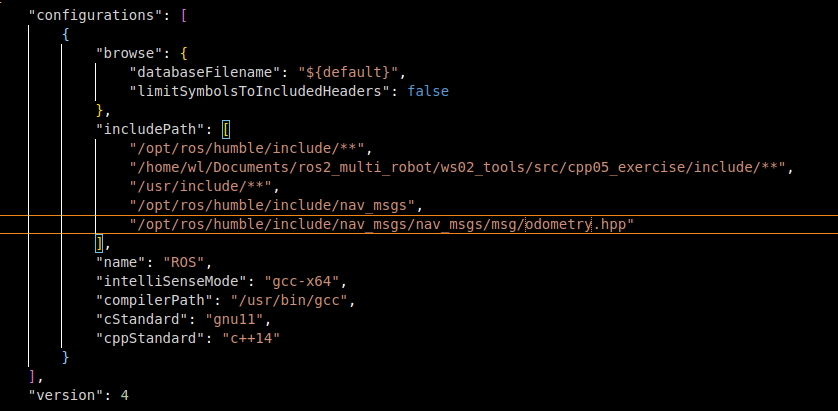
是因为缺少什么安装包吗
环境:Ubuntu 22.04
ros2:humble
报错找不到以下头文件:
1、按CTRL+左键可以跳转到对应的.h文件,如下:
2、在配置中添加了文件的路径,如下:
是因为缺少什么安装包吗
版本:humble
程序:fishbot的工作空间中
问题:想使用C++写一个节点,增加一些功能,但是好像不允许使用C++,找不到头文件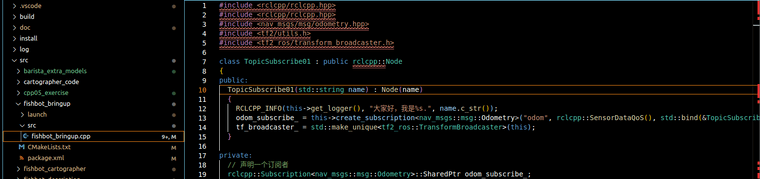
这个是鱼哥自己写的,也是提示无法找到C++的头文件,我自己也创建了一个C++包,同样也是报这个错误。
我自己尝试了创建了一个工作空间,是可以使用C++的,想知道问题出在了哪里。
@小鱼 那我用从你那买了两个四驱小车,可以做吗?我想先学着控制两个,等正式做编队后期再加一个或者两个小车,我应该在例程程的基础上怎么做。
@Greg 是根据官方文档,下载源码编译的,你可以找一下microros的官网,有个例程,然后有教程指导你编译库
@小鱼嗯好的,谢谢鱼哥,我我去看一下。 那鱼哥如果我想控制两辆这种四驱小车,应该怎么做,是一辆领航一辆跟随吗?还是有其他的形式?
环境:Ubuntu22.04
ROS2版本:humble
问题:我通过配置助手把两个小车的命名空间分别设置为了car1和car2,如下:

我使用命令:ros2 run teleop_twist_keyboard teleop_twist_keyboard /cmd_vel:=/car1/cmd_vel 这个命令可以控制一个小车。
我如何改变上位机的程序,去控制这两个小车实现避障。
我现在没啥思路,不知道要改哪里,特来此求助,先感谢大家了。