ros2发布话题运行结果总是不对
-
用python发布话题时,在终端运行结果不变,不知道是否跟配置文件有关
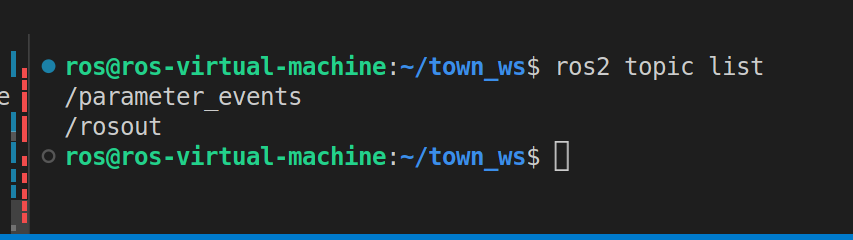
运行后发现话题中并没有sexy_girl这个话题
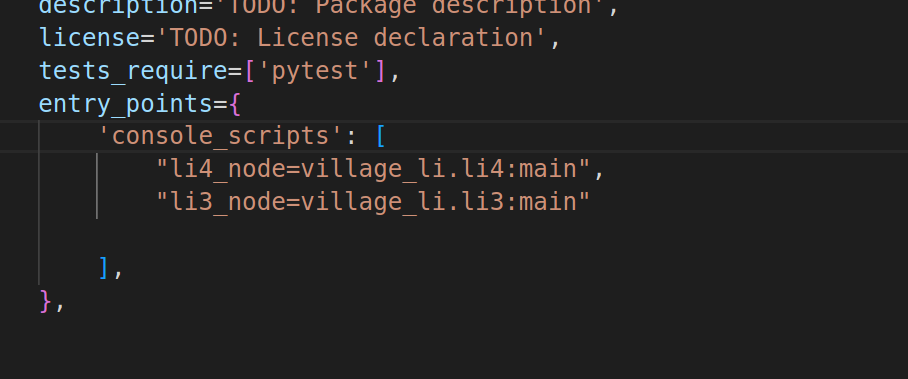
在配置文件中已经讲li4_node指定给了main -
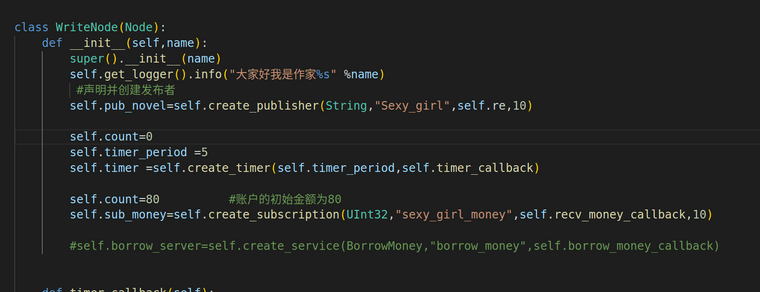
@1503153906 可以看一下Python源码么
-
@SciMaker 这是定义的节点
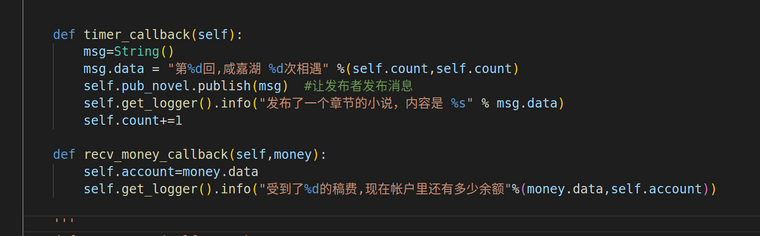
这是定义的两个回调函数
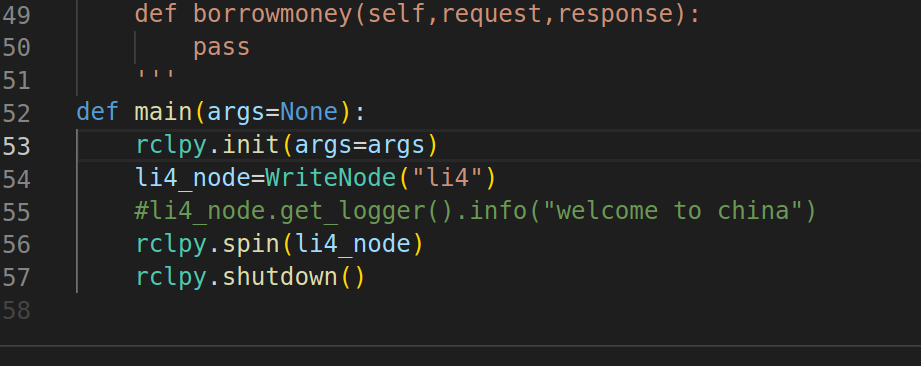
这是定义的主函数
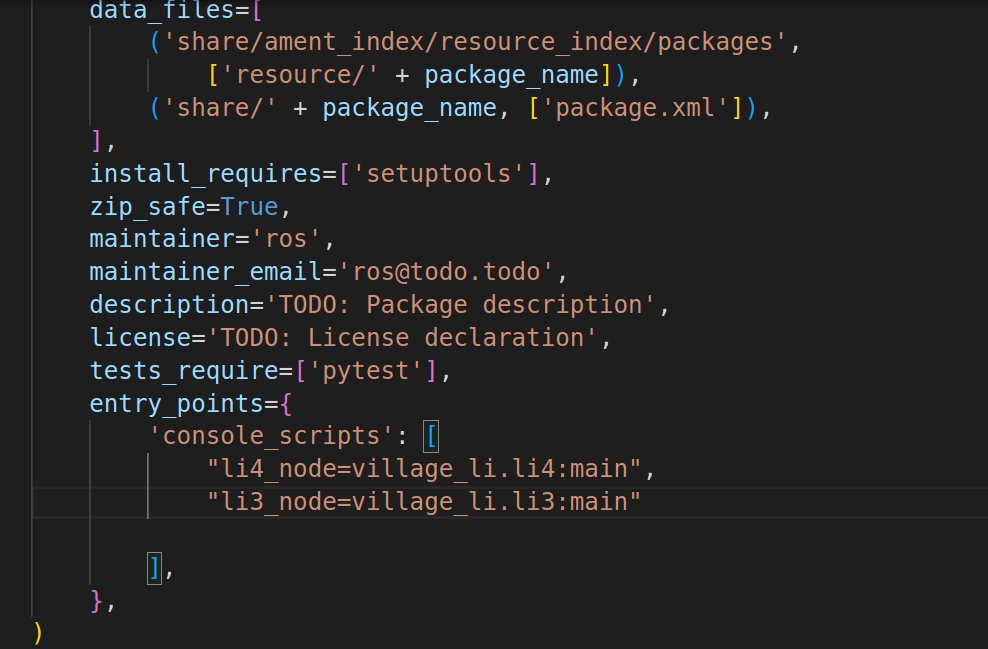
这是配置文件
-
@1503153906 底部加上if name == ‘main’: main()
-
@SciMaker 在配置文件的底部嘛?
-
@1503153906 在python代码里
-
@SciMaker 大佬好像还是运行起来不对