ros2 service发送图片(spin_until_future_complete)超时
-
环境:ubuntu22.04,humble
图片大小:192010803
刚启动的时候正常发送接收(spin_until_future_complete实时返回10几毫秒),运行一段时间后,spin_until_future_complete的callback返回要1-3秒,是不是哪里阻塞了?
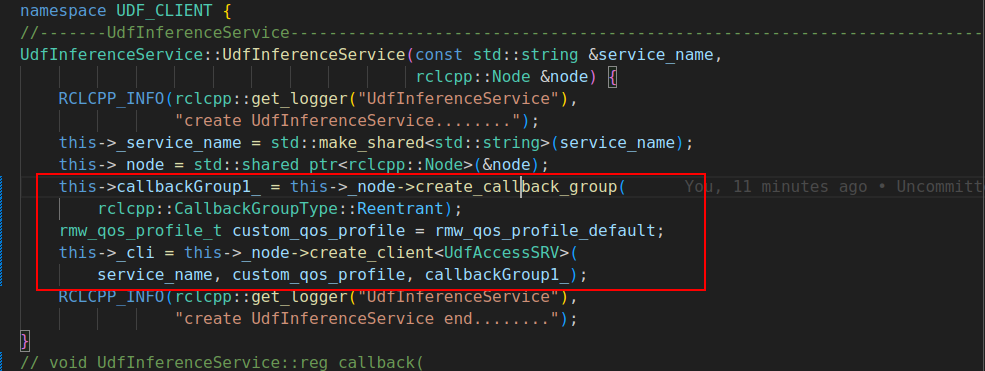
代码:发送

代码:接收

日志:

-
@70664840 建议service和client都用单独的callbackgroup
-
@70664840 我用单独的callbackgroup试试,感谢
-
@小鱼 加了回调组还是不行,目前只有一个服务,一个client,没有其他topic和service,回调里面是不是有个队列阻塞了还是什么呢
-
@70664840 现在不知道是server端阻塞了,还是客户端阻塞了