Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
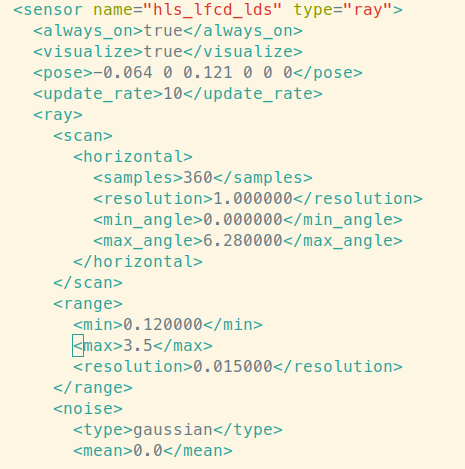
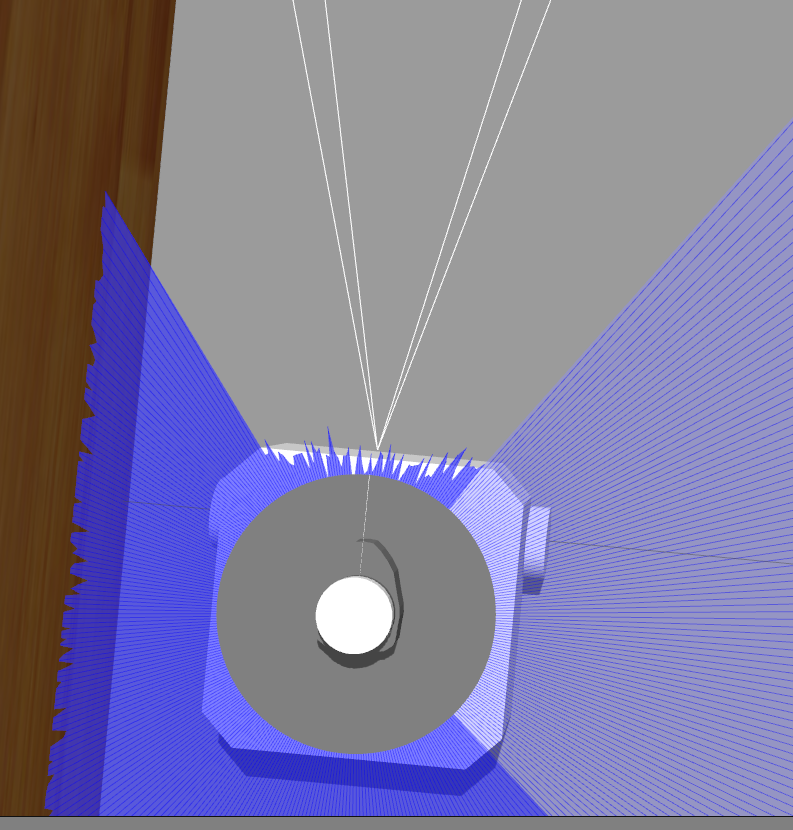
ROS2 版本: humble 使用官方的turtlebot3 gazebo,修改了/opt/ros/humble/share/turtlebot3_gazebo/models/turtlebot3_waffle_pi/model.sdf文件中的laser range max, 从3.5改成5.5(或高于3.5)的值后激光返回值异常,一部分数据在一个很短距离与正确距离之间跳动。
求助 求助 求助