-
今天有鱼粉在群里问小鱼,如何在ros2中实现wait_for_message()函数?
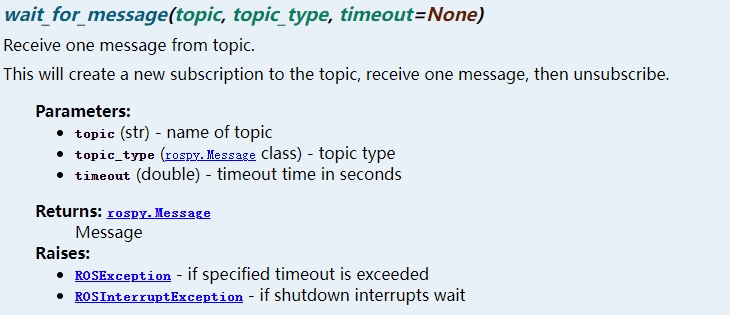
在ros1中可以使用下面的程序,来获取一条指定话题的数据消息
msg = rospy.wait_for_message('话题名字',话题类型)该函数实现原理为:创建一个订阅,接收一条消息,取消订阅
https://docs.ros.org/en/diamondback/api/rospy/html/rospy.client-module.html#wait_for_message
照着这个原理,我们可以写一个ROS2中相同的函数,但是需要注意ROS2中的rospy不是多线程的了,所以不能和ROS1中该函数实现一样,一直等待消息而不用spin()。所以在ROS2中我们可以这样来实现这个函数
def wait_for_message(node ,topic_type, topic): class _vfm(object): def __init__(self) -> None: self.msg = None def cb(self, msg): self.msg = msg vfm = _vfm() subscription = node.create_subscription(topic_type,topic,vfm.cb,1) while rclpy.ok(): if vfm.msg != None: return vfm.msg rclpy.spin_once(node) time.sleep(0.001) # unsubcription subscription.destroy()完整测试代码如下:
#!/usr/bin/env python3 import rclpy from rclpy.node import Node from std_msgs.msg import String import time def wait_for_message(node ,topic_type, topic): class _vfm(object): def __init__(self) -> None: self.msg = None def cb(self, msg): self.msg = msg vfm = _vfm() subscription = node.create_subscription(topic_type,topic,vfm.cb,1) while rclpy.ok(): if vfm.msg != None: return vfm.msg rclpy.spin_once(node) time.sleep(0.001) # unsubcription subscription.destroy() def main(args=None): rclpy.init(args=args) node = Node("test_message_node") msg = wait_for_message(node, String, "/test_sub") print(f'wait_for_message:{msg}') rclpy.spin(node) rclpy.shutdown() if __name__ == '__main__': main()ros2 topic pub /test_sub std_msgs/msg/String '{data: "123"}' -
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在
-
小 小鱼 将这个主题转为普通主题,在
-
小 小鱼 从 中的 小伊记录 移动了该主题