rviz2中的camera插件无法显示影像
-
@小鱼
 /home/x/图片/截图/截图 2023-08-31 15-47-42.png
/home/x/图片/截图/截图 2023-08-31 15-47-42.png
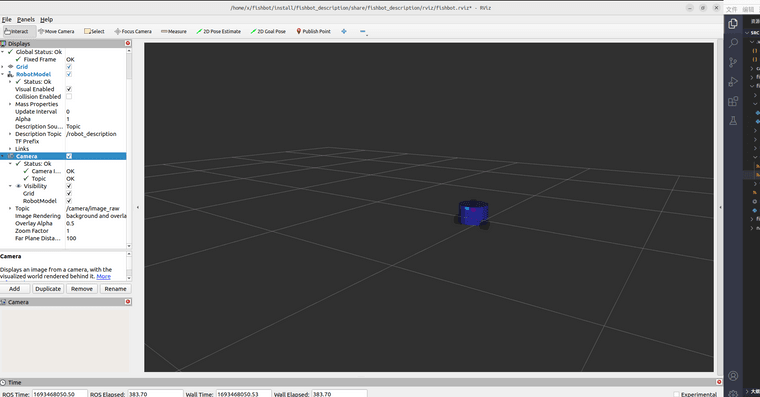
我启动了gazebo仿真环境后启动rviz2,但是camera插件无法显示图像
这是urdf中关于camera的代码
<link name="camera_link">
<visual>
<geometry>
<cylinder radius="0.02" length="0.02" />
</geometry>
<material name="yellow">
<color rgba="0.0 0.7 0.8 1.0" />
</material>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</visual>
<collision>
<geometry>
<cylinder radius="0.02" length="0.02" />
</geometry>
<material name="yellow">
<color rgba="0.0 0.7 0.8 1.0" />
</material>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</collision>
<inertial>
<mass value="0.1" />
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036" />
</inertial>
</link><joint name="camera_joint" type="fixed">
<parent link="base_link" />
<child link="camera_link" />
<origin xyz="-0.08 0.0 0.05" />
</joint>
<gazebo reference="camera_link">
<sensor type="camera" name="camera_sensor">
<visualize>true</visualize>
<!-- Set always_on only sensor, not on plugin -->
<always_on>true</always_on>
<!-- Set update_rate only sensor, not on plugin -->
<update_rate>30</update_rate>
<camera name="camera_sensor">
<distortion>
<k1>0.1</k1>
<k2>0.2</k2>
<k3>0.3</k3>
<p1>0.4</p1>
<p2>0.5</p2>
<center>0.5 0.5</center>
</distortion>
</camera><plugin name="plugin_name" filename="libgazebo_ros_camera.so"> <ros> <namespace>/camera</namespace> <remapping>image_raw:=image_raw</remapping> <remapping>camera_info:=camera_info</remapping> </ros> <camera_name>camera_sensor</camera_name> <frame_name>camera_link</frame_name> <hack_baseline>0.07</hack_baseline> </plugin> </sensor></gazebo>
-
@927348581 从您提供的URDF和Gazebo配置中看起来,您已经正确地定义了一个包含摄像机的链接,并且已经配置了Gazebo摄像机传感器和ROS插件。但是,如果摄像机插件无法在RViz2中显示图像,可能有几种原因需要检查:
TF树(Transforms)的配置:确保您的TF树正确配置,以使camera_link与其他需要的框架正确链接。在ROS中,TF树负责将不同坐标系之间的变换关系传递给RViz2和其他节点。检查camera_link的框架是否正确命名和链接。
传感器标定:您在<distortion>标签下提供了摄像机的畸变参数,但确保这些参数正确。不正确的参数可能导致图像不正确。
ROS话题重映射(Remapping):您在插件配置中使用了<remapping>标签来指定图像和相机信息话题的重映射。确保这些重映射名称与RViz2中的配置匹配。您可以通过在RViz2中检查图像和相机信息话题是否正确来验证这一点。
RViz2配置:在RViz2中,确保您正确配置了摄像机视图。您可以通过点击RViz2界面中的“Add”按钮,然后选择“By Topic”来添加摄像机图像。确保选择的话题与您在插件配置中指定的话题匹配。
传感器状态:确保Gazebo中的仿真环境已正确启动,传感器处于工作状态。您可以通过在终端中运行rostopic list来检查话题是否可用,并使用rostopic echo查看图像消息是否正在发布。
日志和错误消息:检查终端中是否有与摄像机插件或RViz2相关的错误消息或警告。这可以提供有关问题的更多信息。
如果您在检查了上述事项后仍然遇到问题,建议在RViz2中启用调试模式以获取更多信息,或者查看ROS和Gazebo的日志文件以查找潜在的问题。希望这些提示有助于您解决问题并显示摄像机图像。