humble orbslam3 rgb-d
-
ros2 humble 做 orbslam3
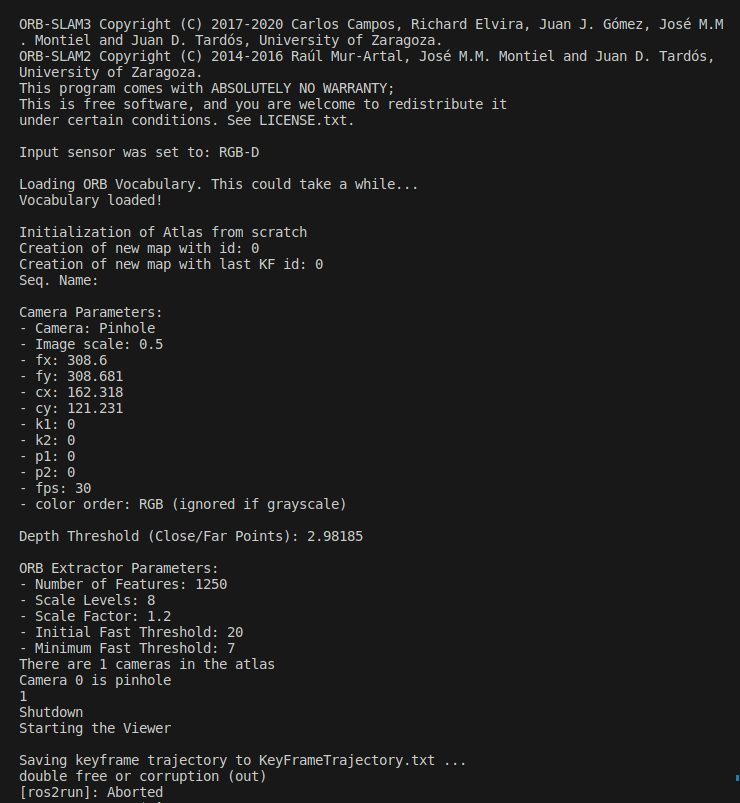
使用 RGB-D 相机时,加载完词典和相机参数后,程序直接退出
查看代码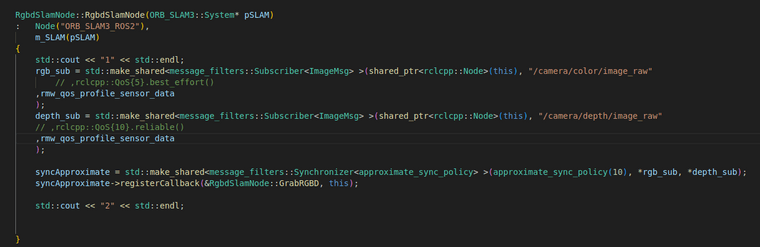
程序只执行到 1,随后的订阅话题好像没有执行,连 2 都没执行,修改 qos也没啥用,使用单目到是能 正常建图,请问这需要修改哪里呢 -
@1157354382 再详细定位是那一行 挂掉的
-
@1157354382 老哥,我也相配humble下的orbslam3用realsense跑rgbd,请问老哥是怎么配的环境呀,我在网上只找到melodic下的orbslam