@小鱼 感谢小鱼儿的帮助。我将 gmapping的 Durability 修改成了 transient_local ,map_saver保持一致了,也能进行保存工作。困扰了快一个星期了,感谢帮助。
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1157354382 发布的最佳帖子
-
RE: ROS2 机器人在静止下地图无法保存,需在移动时才能保存地图发布在 ROS2
1157354382 发布的最新帖子
-
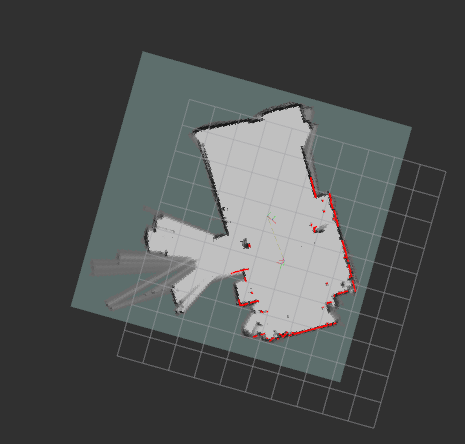
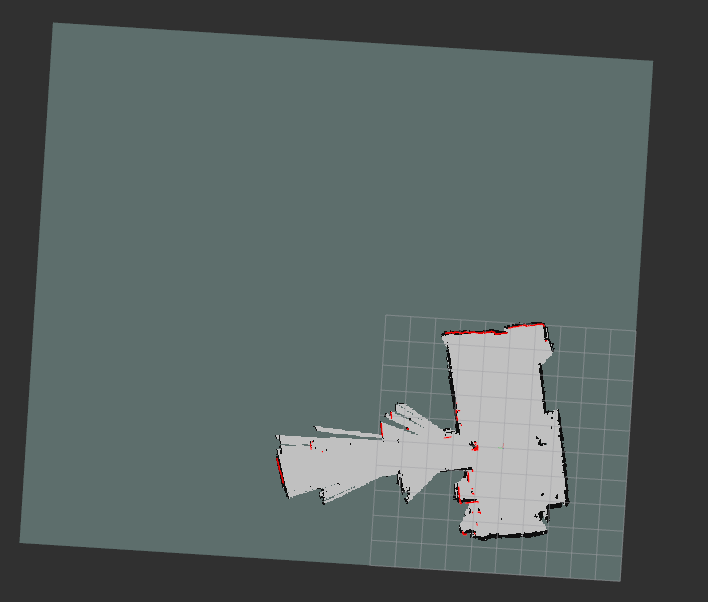
humble orbslam3 rgb-d发布在 ROS2
ros2 humble 做 orbslam3
使用 RGB-D 相机时,加载完词典和相机参数后,程序直接退出
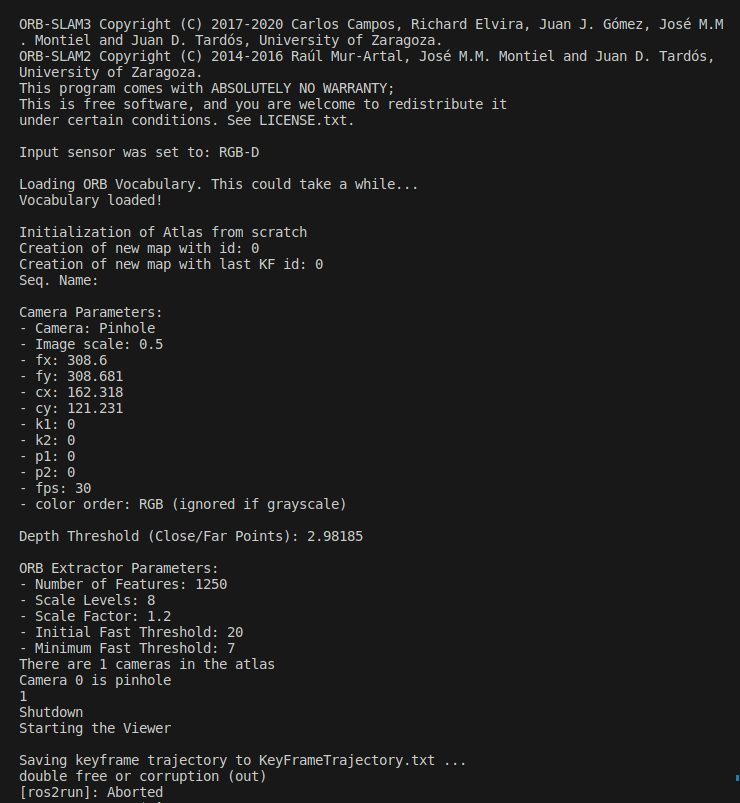
查看代码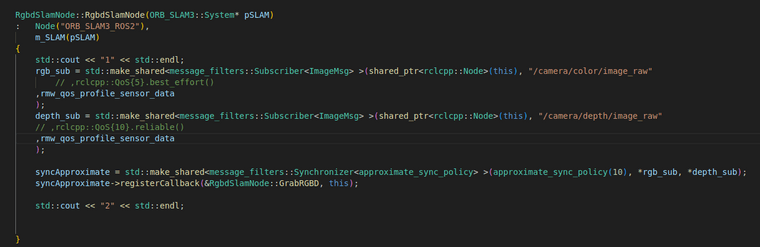
程序只执行到 1,随后的订阅话题好像没有执行,连 2 都没执行,修改 qos也没啥用,使用单目到是能 正常建图,请问这需要修改哪里呢 -
humble 导航发布在 Nav2
ROS2 humble
在导航中 会出现以下警告:[lifecycle_manager-13] 2023-08-16 20:14:03.433 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts [lifecycle_manager-13] 2023-08-16 20:14:04.457 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts [lifecycle_manager-13] 2023-08-16 20:14:05.396 [RTPS_READER_HISTORY Error] Change payload size of '24' bytes is larger than the history payload size of '11' bytes and cannot be resized. -> Function can_change_be_added_nts这是什么东西,是因为我的ros没下载好吗,我在galactic中似乎没遇到这种情况