求助:如何仅获取激光雷达和障碍物之间的距离并导出的方法或者思路
-
Ubuntu22.04+ROS2 Humble+gazebo11+激光雷达。
场景描述:激光雷达部署在小车上,目的让小车不断靠近障碍物。
障碍物是四个柱子,小车需要到达四个柱子之间。
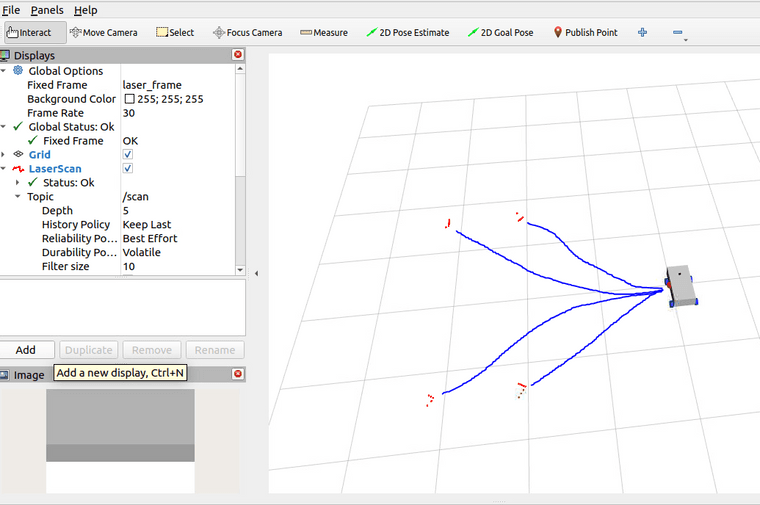
途径:首先尝试获取、激光雷达/sacn话题的返回值,发现大量0值及无穷大值,且在终端中不知如何导出。目标:获取激光雷达到四个障碍物之间的距离,并导出。(即下图中蓝线的长度)某一时刻的快照或者数据流均可。
-
@2539692494 先提取到四个目标点的坐标,根据场景做特征提取
-
@小鱼 我尝试一下,感谢!!
-
2 2539692494 将这个主题标记为已解决,在