@小鱼 我尝试一下,感谢!!
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2539692494 发布的最新帖子
-
求助:如何仅获取激光雷达和障碍物之间的距离并导出的方法或者思路发布在 综合问题
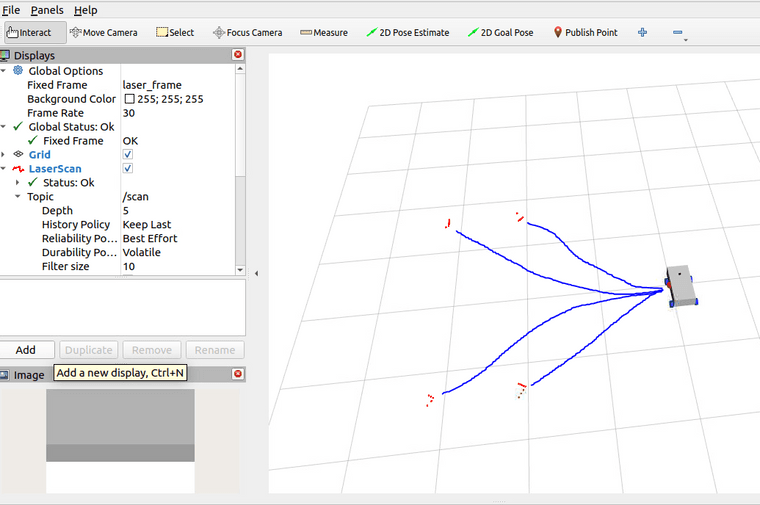
Ubuntu22.04+ROS2 Humble+gazebo11+激光雷达。
场景描述:激光雷达部署在小车上,目的让小车不断靠近障碍物。
障碍物是四个柱子,小车需要到达四个柱子之间。
途径:首先尝试获取、激光雷达/sacn话题的返回值,发现大量0值及无穷大值,且在终端中不知如何导出。目标:获取激光雷达到四个障碍物之间的距离,并导出。(即下图中蓝线的长度)某一时刻的快照或者数据流均可。
-
同一服务器下的虚拟机之间gazebo的模型+运动发生同步现象发布在 综合问题
ubantu 22.04 ROS2-humble VMware
问题描述:在同一服务器下的两台虚拟机两个人使用的过程中,A打开gazebo后导入模型并使用键盘进行控制运动,B的gazebo界面中同样出现该模型并且运动和A的动作一致。
问题排查:1、因设置过github的同步,在删除.ignore文件后该现象仍出现。
2、更改模型名字后导入,仍出现。怀疑:gazebo的命令或话题发布的形式是通过从一个服务器上向下分发的?
还是有别的原因? -
RE: 使用launch启动gazebo,机器人无法显示发布在 Nav2
相同的问题,之前看到一篇让退出conda环境,但是没有安装conda.
除了重装还有别的方法吗?另外: 说环境乱了,这个有什么办法清理吗?