启动MicroROS服务后,数据显示,但是无法查看fishbot相关话题
-
fishbot基础版
在虚拟机16p上使用的是humble,出现的话题只有这两个
ros2 topic list
/parameter_events
/rosout在此之前,我运行了配置助手
xhost + && sudo docker run -it --rm --privileged -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAY fishros2/fishbot-tool:v1.0.0.20230105 python3 main.py以及启动microROS服务
docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6我的ip
ip -4 a | grep inet inet 127.0.0.1/8 scope host lo inet 192.168.0.17/24 brd 192.168.0.255 scope global dynamic noprefixroute ens37 inet 172.17.0.1/16 brd 172.17.255.255 scope global docker0 yh@ros2:~$配置助手中的配置已经改了
2023-11-01 02:37:28 > [提示]获取到当前系统设备 ['/dev/ttyUSB0'] 2023-11-01 02:37:33 > [提示]获取到当前设备为motion_board 2023-11-01 02:37:33 > [提示]读取到配置项first_startup->0 2023-11-01 02:37:33 > [提示]读取到配置项serial_baud->921600 2023-11-01 02:37:33 > [提示]读取到配置项serial_id->0 2023-11-01 02:37:33 > [提示]读取到配置项wifi_ssid->***** 2023-11-01 02:37:33 > [提示]读取到配置项wifi_pswd->***** 2023-11-01 02:37:33 > [提示]读取到配置项wifi_ap_ssid->FISHBOT_98E0 2023-11-01 02:37:33 > [提示]读取到配置项wifi_ap_pswd-> 2023-11-01 02:37:33 > [提示]读取到配置项microros_mode->udp_client 2023-11-01 02:37:33 > [提示]读取到配置项udpserver_ip->192.168.0.17 2023-11-01 02:37:33 > [提示]读取到配置项udpserver_port->8888搜索了相关的问题,以及看了鱼哥的常见问题和其中的回答,好像没有人和我有一样的问题,重启了几次还按了RST,也没找到原因
-
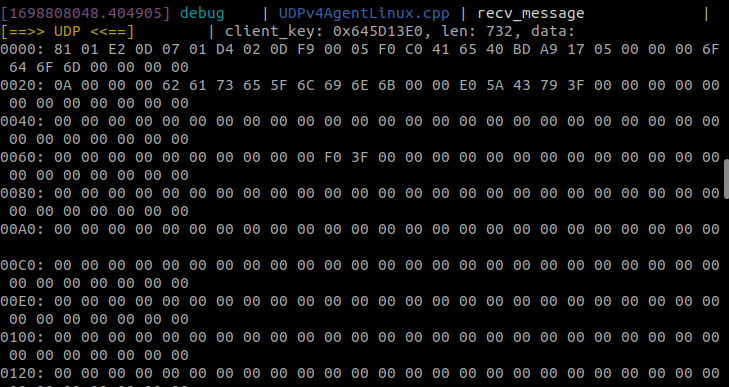
这是回显的图片,试了几次,好像没法复制 -
@417681880 看图片已经驱动成功了,没有话题可能是通信问题,docker可能不适合你,可以试试 直接驱动:https://fishros.org.cn/forum/topic/1295/agent-手动编译-不用docker-以及树莓派上使用micros-agent的方法/10
该方法在主机上一样可以用,对了,你是无线 通信,最后
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888 -v6 -
@417681880 解决了没有啊,我的还是没用
-
@小鱼 手动编译-不用docker-以及树莓派上使用micros-agent的方法/10,最后一步colcon build
报错: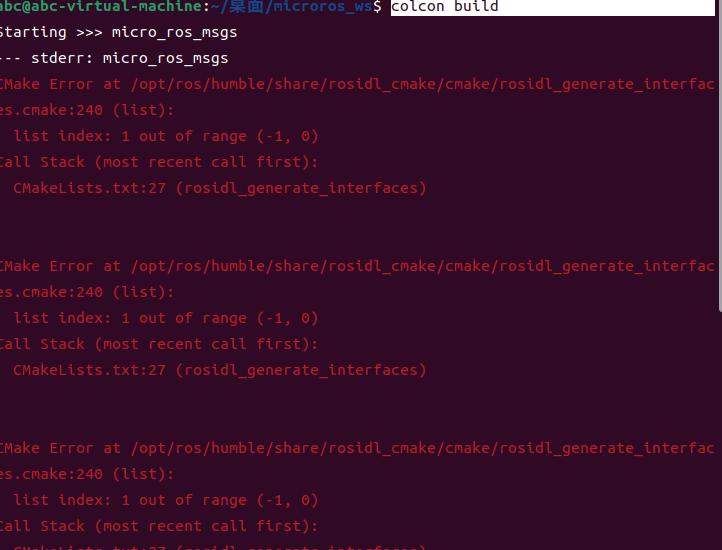 ![29]DZ$PH(6R)ATQNQ~G6T~W.png](/forum/assets/uploads/files/1708066344318-29-dz-ph-6r-atqnq-g6t-w.png)
![29]DZ$PH(6R)ATQNQ~G6T~W.png](/forum/assets/uploads/files/1708066344318-29-dz-ph-6r-atqnq-g6t-w.png) 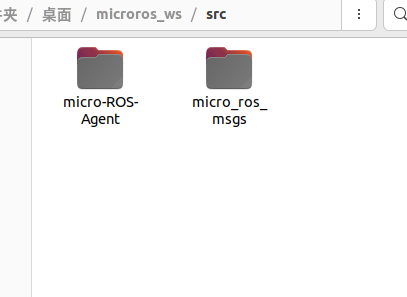 ,我用docker也没有fishbot的话题
,我用docker也没有fishbot的话题 -
@3107926719 我的也没用
-
@3107926719 不要把功能包放在桌面,这样路径里有中文,会导致编译失败