Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
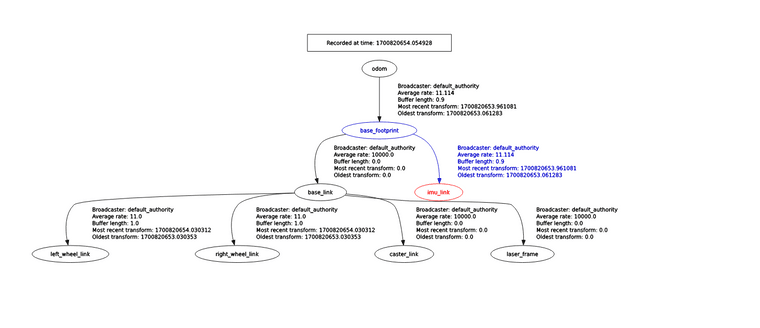
这边在fishbot_bringup.cpp文件上添加了imu相关的处理代码,获取话题,参照了订阅odom话题接收里程计信息,增加了imu发布底盘坐标系到基座标坐标系的坐标变换信息 但是打开rviz之后发现imu一直在跳动,请问这种是什么情况会导致吗 是需要像odom那样处理吗 ,我只是想要将两者混合使用,求教
在rviz跳动的情况是 上下左右晃动。