Cartographer-在打开rviz后配置map时无法正常配置一直出现警告
-
配置时map一直显示```
not map recevied终端显示``` [WARN] [1651918306.957416732] [occupancy_grid_node]: submap_slices and last_frame_id is empty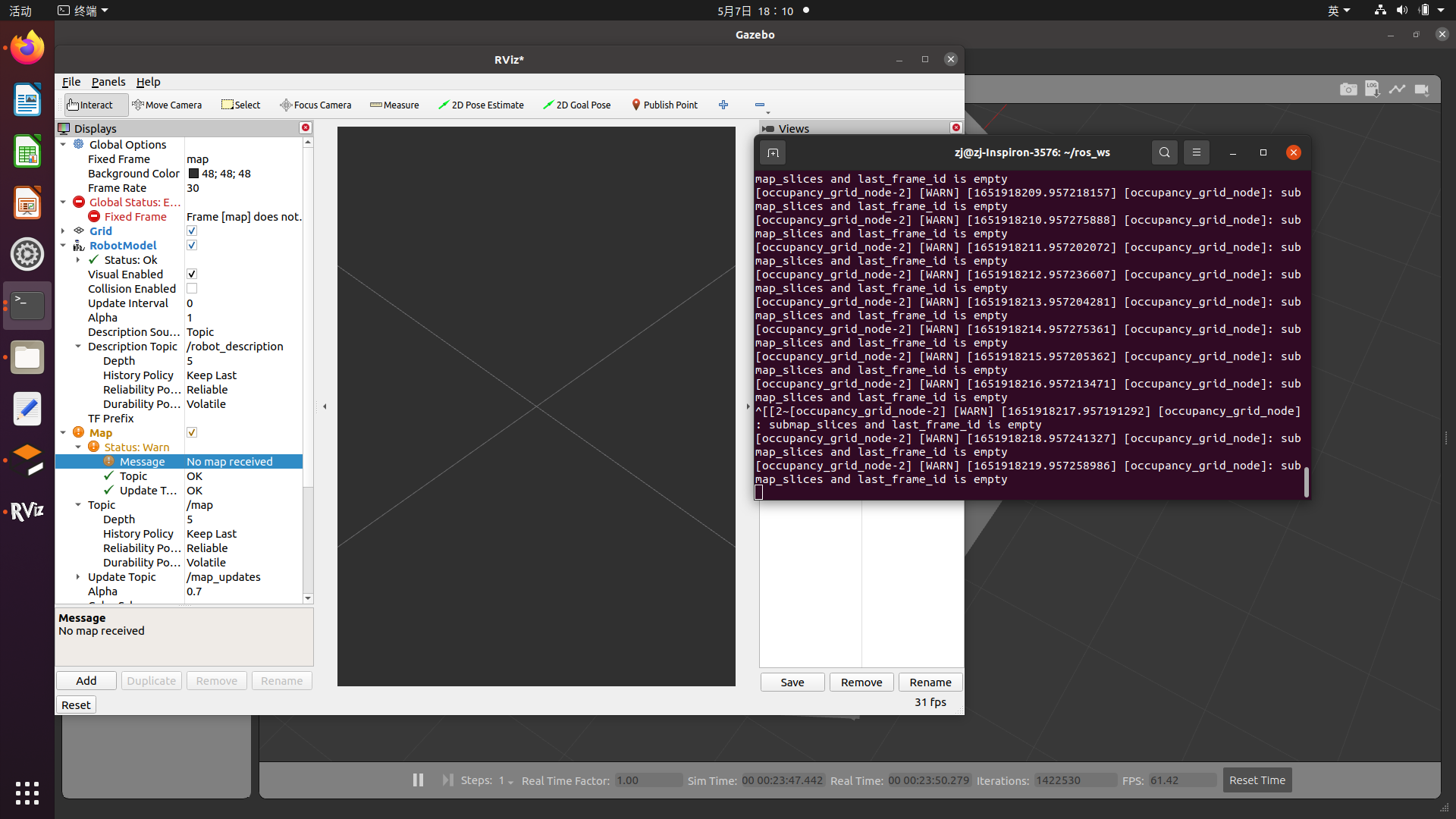
-
@15014960082 这个结合tf书看最有效,贴一下tf树。
-
@15014960082 occupancy_grid_node 没有从cartographer node 获取到地图数据。
-
我也是这样,兄弟怎么解决的?