Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
我使用ros2 galactic版本建图的时候,一直提示laser 雷达的数据早与transform缓存,请问一下,这是什么原因导致的呢? Message Filter dropping message: frame 'laser' at time 2464.616 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
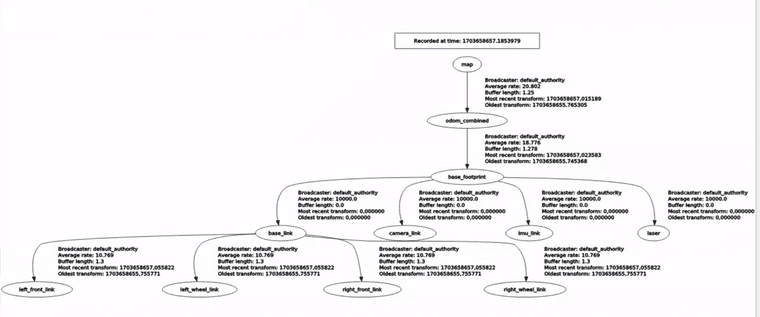
以下是我的tf树
雷达时钟和本机时间对齐一下,ntpdate到对应ip就行