micro_ros 与ros通讯的问题
-
软件版本:ros-humble+ubuntu22.04
硬件:stm32f405rg
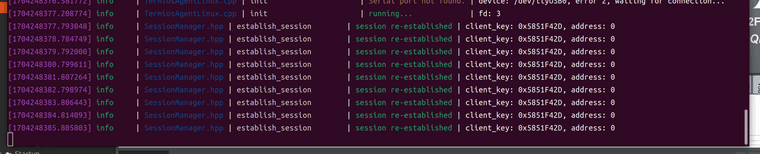
按照官方教程将micro_ros移植到stm32后,运行micro_ros_agent产生如下报错:

换了个串口,又发生如下情况:
代码如下,
freertos.c/* USER CODE BEGIN Header */ /** ****************************************************************************** * File Name : freertos.c * Description : Code for freertos applications ****************************************************************************** * @attention * * Copyright (c) 2023 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "FreeRTOS.h" #include "task.h" #include "main.h" #include "cmsis_os.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "usart.h" #include <rcl/rcl.h> #include <rcl/error_handling.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <uxr/client/transport.h> #include <rmw_microxrcedds_c/config.h> #include <rmw_microros/rmw_microros.h> #include <std_msgs/msg/int32.h> /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ #define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){printf("Failed status on line %d: %d. Aborting.\n",__LINE__,(int)temp_rc);vTaskDelete(NULL);}} #define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){printf("Failed status on line %d: %d. Continuing.\n",__LINE__,(int)temp_rc);}} /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN Variables */ bool cubemx_transport_open(struct uxrCustomTransport * transport); bool cubemx_transport_close(struct uxrCustomTransport * transport); size_t cubemx_transport_write(struct uxrCustomTransport* transport, const uint8_t * buf, size_t len, uint8_t * err); size_t cubemx_transport_read(struct uxrCustomTransport* transport, uint8_t* buf, size_t len, int timeout, uint8_t* err); void * microros_allocate(size_t size, void * state); void microros_deallocate(void * pointer, void * state); void * microros_reallocate(void * pointer, size_t size, void * state); void * microros_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state); /* USER CODE END Variables */ /* Definitions for defaultTask */ osThreadId_t defaultTaskHandle; const osThreadAttr_t defaultTask_attributes = { .name = "defaultTask", .stack_size = 3000 * 4, .priority = (osPriority_t) osPriorityNormal, }; /* Private function prototypes -----------------------------------------------*/ /* USER CODE BEGIN FunctionPrototypes */ void subscription_callback(const void * msgin) { // Cast received message to used type const std_msgs__msg__Int32 * msg = (const std_msgs__msg__Int32 *)msgin; // Process message } /* USER CODE END FunctionPrototypes */ void StartDefaultTask(void *argument); void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */ /** * @brief FreeRTOS initialization * @param None * @retval None */ void MX_FREERTOS_Init(void) { /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* USER CODE BEGIN RTOS_MUTEX */ /* add mutexes, ... */ /* USER CODE END RTOS_MUTEX */ /* USER CODE BEGIN RTOS_SEMAPHORES */ /* add semaphores, ... */ /* USER CODE END RTOS_SEMAPHORES */ /* USER CODE BEGIN RTOS_TIMERS */ /* start timers, add new ones, ... */ /* USER CODE END RTOS_TIMERS */ /* USER CODE BEGIN RTOS_QUEUES */ /* add queues, ... */ /* USER CODE END RTOS_QUEUES */ /* Create the thread(s) */ /* creation of defaultTask */ defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes); /* USER CODE BEGIN RTOS_THREADS */ /* add threads, ... */ /* USER CODE END RTOS_THREADS */ /* USER CODE BEGIN RTOS_EVENTS */ /* add events, ... */ /* USER CODE END RTOS_EVENTS */ } /* USER CODE BEGIN Header_StartDefaultTask */ /** * @brief Function implementing the defaultTask thread. * @param argument: Not used * @retval None */ /* USER CODE END Header_StartDefaultTask */ void StartDefaultTask(void *argument) { /* USER CODE BEGIN StartDefaultTask */ // micro-ROS configuration rmw_uros_set_custom_transport( true, (void *) &huart1, cubemx_transport_open, cubemx_transport_close, cubemx_transport_write, cubemx_transport_read); rcl_allocator_t freeRTOS_allocator = rcutils_get_zero_initialized_allocator(); freeRTOS_allocator.allocate = microros_allocate; freeRTOS_allocator.deallocate = microros_deallocate; freeRTOS_allocator.reallocate = microros_reallocate; freeRTOS_allocator.zero_allocate = microros_zero_allocate; if (!rcutils_set_default_allocator(&freeRTOS_allocator)) { printf("Error on default allocators (line %d)\n", __LINE__); } // micro-ROS app rcl_publisher_t publisher; std_msgs__msg__Int32 msg; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; rcl_subscription_t hx_subscriber; rclc_executor_t hx_executor; std_msgs__msg__Int32 hxmsg; allocator = rcl_get_default_allocator(); //create init_options rclc_support_init(&support, 0, NULL, &allocator); // create node rclc_node_init_default(&node, "cubemx_node", "", &support); // create publisher rclc_publisher_init_default( &publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), "cubemx_publisher"); msg.data = 0; const char * subscriber_name = "hx_topic"; rclc_subscription_init_default( &hx_subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), subscriber_name); RCCHECK(rclc_executor_init(&hx_executor, &support.context, 1, &allocator)); RCCHECK(rclc_executor_add_subscription(&hx_executor, &hx_subscriber, &hxmsg, &subscription_callback, ON_NEW_DATA)); /* Infinite loop */ for(;;) { rcl_ret_t ret = rcl_publish(&publisher, &msg, NULL); if (ret != RCL_RET_OK) { printf("Error publishing (line %d)\n", __LINE__); } rclc_executor_spin_some(&hx_executor, RCL_MS_TO_NS(100)); msg.data++; osDelay(10); } /* USER CODE END StartDefaultTask */ } /* Private application code --------------------------------------------------*/ /* USER CODE BEGIN Application */ /* USER CODE END Application */main.c
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2023 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "cmsis_os.h" #include "dma.h" #include "usart.h" #include "usb_otg.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); void MX_FREERTOS_Init(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_DMA_Init(); MX_USB_OTG_FS_PCD_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Init scheduler */ osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */ MX_FREERTOS_Init(); /* Start scheduler */ osKernelStart(); /* We should never get here as control is now taken by the scheduler */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Configure the main internal regulator output voltage */ __HAL_RCC_PWR_CLK_ENABLE(); __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 8; RCC_OscInitStruct.PLL.PLLN = 336; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 7; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV2; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief Period elapsed callback in non blocking mode * @note This function is called when TIM14 interrupt took place, inside * HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment * a global variable "uwTick" used as application time base. * @param htim : TIM handle * @retval None */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { /* USER CODE BEGIN Callback 0 */ /* USER CODE END Callback 0 */ if (htim->Instance == TIM14) { HAL_IncTick(); } /* USER CODE BEGIN Callback 1 */ /* USER CODE END Callback 1 */ } /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ -
@1447790484 在 micro_ros 与ros通讯的问题 中说:
while (1)
{
/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}
这里死循环,会不会影响调度,价格 task delay ?
暂时关闭,还有问题再打开
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在