物理机器人导航到目标点之后不会停下来
-
ros2 galactic Ubuntu20.04 阿克曼底盘
采用navigation2导航堆栈中的Hybrid-A*算法插件和teb插件进行单点导航
车子运行到rviz上发布的目标点之后,不会停下来。全局规划器会继续规划一条圆圈形状的路径继续往前走。
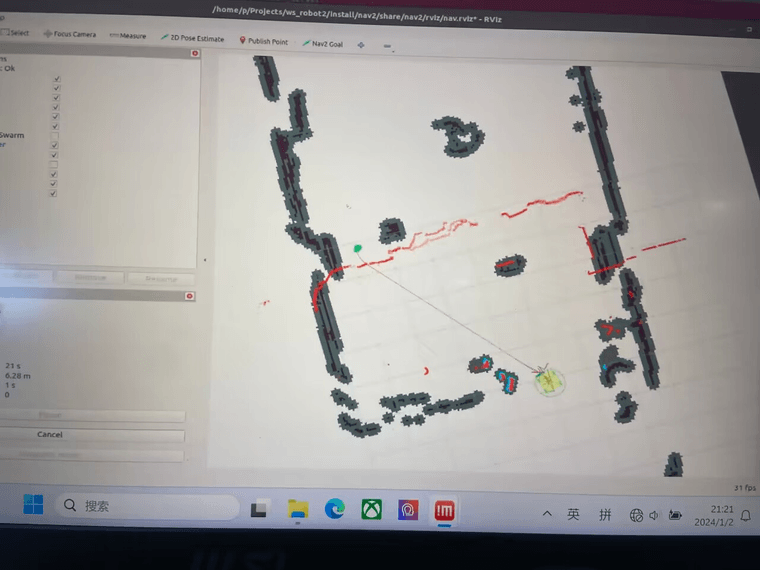
如上图,绿色点为rviz上发布的目标点。
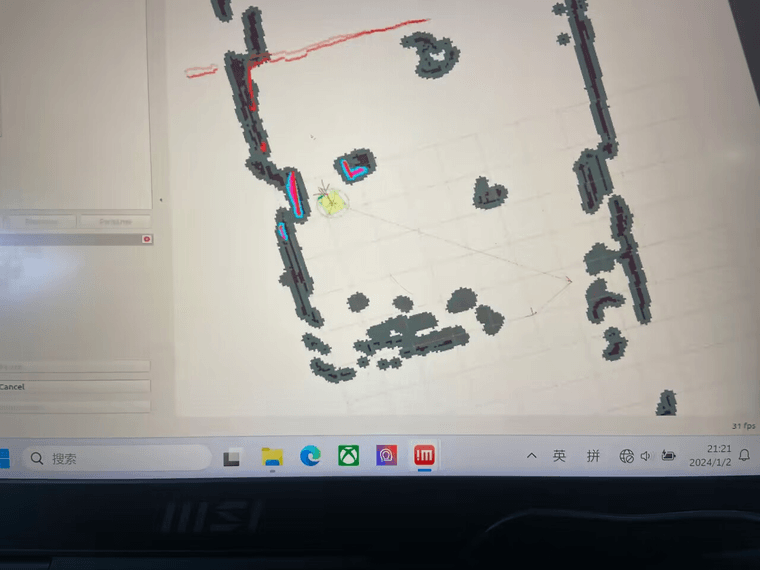
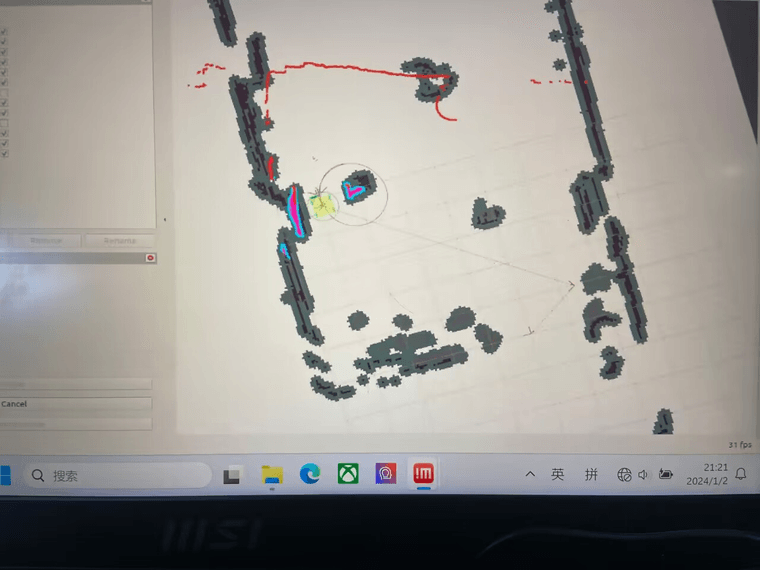
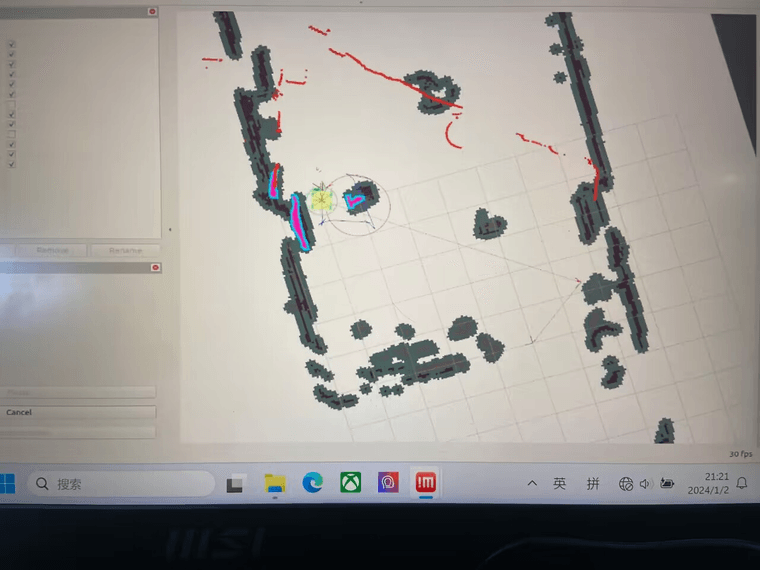
如上图,车辆到了目标点之后,会继续往前走。
请问为什么车辆到了目标点不会停下来?有什么解决办法没?谢谢各位大佬!!卡在这好久了,忘大佬们伸伸手帮一下
-
-
大佬您好,我最近也在做实物的阿克曼小车导航,但是我更换插件之后,小车并不会运动。无论使用是什么都不会运动。想问大佬您方便分享一下吗?
-
@3568485143 我也是碰到这种问题,小车老是转圈到达目标点,我把weight_kinematics_forward_drive权重已经调到最大了,但是还是不行,请问大佬你解决这个问题了吗