手眼标定handeye-calib包使用问题
-
针对眼在手上的手眼标定代码还有些不理解的地方
- 1、
(1)
(2)

(3)
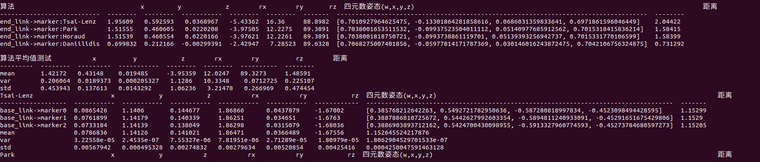
这里的hctx、hcty、hctz应该是夹爪和相机的平移向量,添加进result_tuple后作为返回值传入图(3)的pose中,因此
data.append(["end_link->marker:"+algoram,pose[0],pose[1],pose[2],pose[3],pose[4],pose[5],pose[6],hand_calib._distance(pose[0],pose[1],pose[2])])这里是否应该是"end_link->camera" - 2、这里的算法平均值测试是针对谁的呢,没有理解这个
- 1、
-
@1468842019 你好,可以请教一下关于手眼标定的问题吗
-
@1468842019
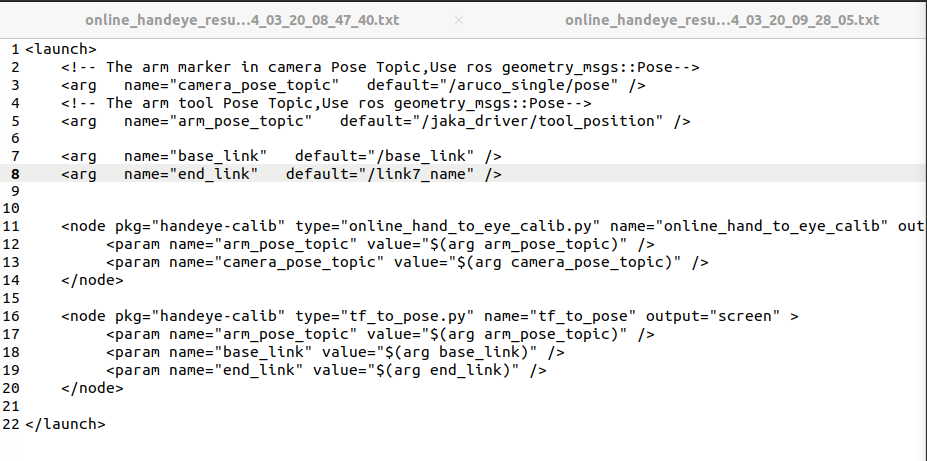 我这个设置有问题吗
我这个设置有问题吗 -
@1468842019
 我的结果标准差很大,可以指导一下吗
我的结果标准差很大,可以指导一下吗 -
@2279625101 不好意思,我也是小白

-
@1468842019 你好,我拿到标定结果了,但是不知道怎么用,看小鱼老师的那篇blog也不是很懂,可以请教一下你吗
-
@2279625101 您好,解决了吗?碰到一些问题,可以一起讨论一下吗?