-
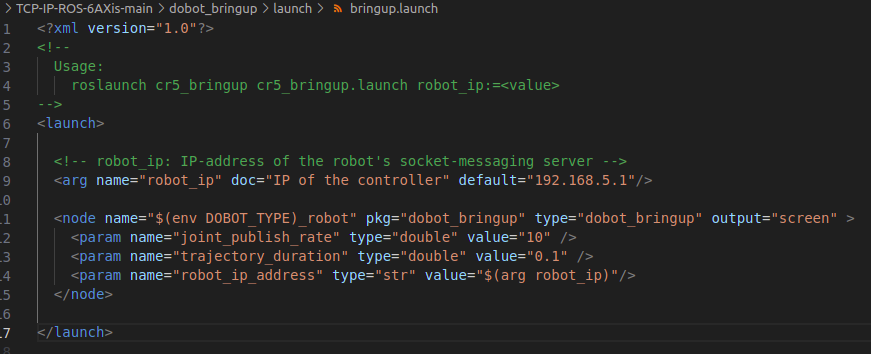
launch文件代码如下,
node pkg = “dobot_bringup”,node_type="dobot_bringup"
-
dobot_bringup文件夹下结构如下
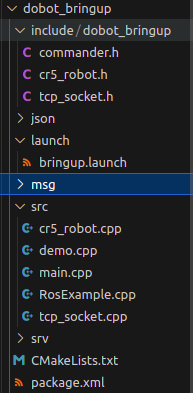
dobot_bringup文件下没有名为"dobot_bringup.cpp”文件,我应该如何知道launch文件节点对应的源代码是哪个cpp文件呢
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1468842019 发布的最新帖子
-
launch节点启动问题发布在 综合问题
-
手眼标定handeye-calib包使用问题发布在 综合问题
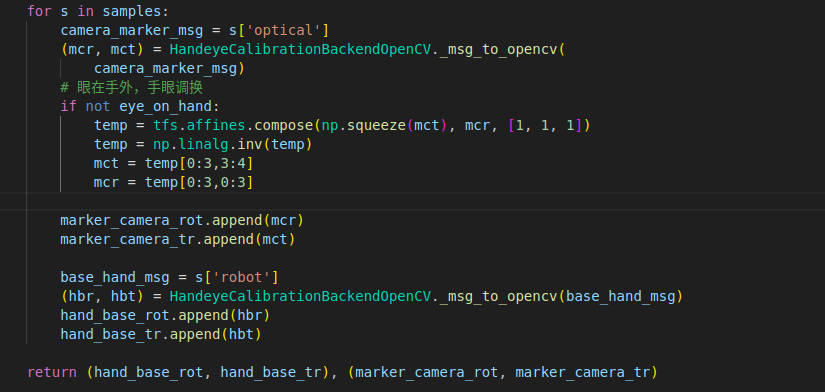
针对眼在手上的手眼标定代码还有些不理解的地方
- 1、
(1)
(2)

(3)
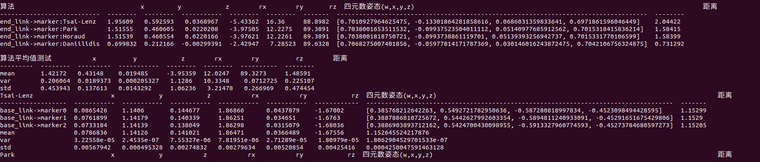
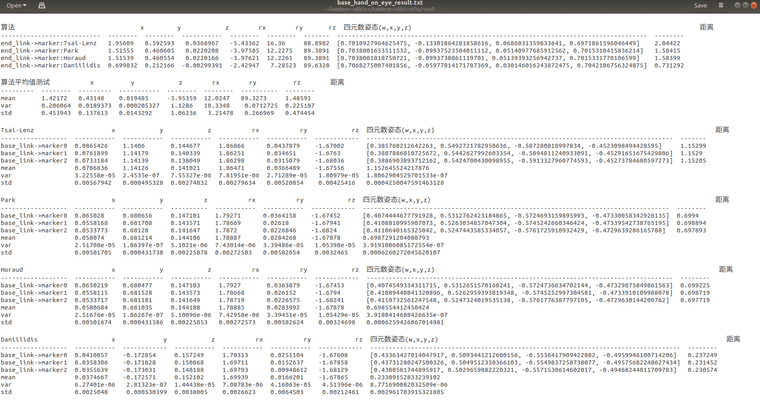
这里的hctx、hcty、hctz应该是夹爪和相机的平移向量,添加进result_tuple后作为返回值传入图(3)的pose中,因此
data.append(["end_link->marker:"+algoram,pose[0],pose[1],pose[2],pose[3],pose[4],pose[5],pose[6],hand_calib._distance(pose[0],pose[1],pose[2])])这里是否应该是"end_link->camera" - 2、这里的算法平均值测试是针对谁的呢,没有理解这个
- 1、
-
手眼标定handeye-calib包使用问题发布在 综合问题
在使用手眼标定handeye-calib包的基础标定时,为了得到眼在手上的标定结果,是否需要将eye_on_hand的参数改为True(修改前后标定结果没有变化,不知道是否是正确
-
1、

-
2、
-
3、
-
