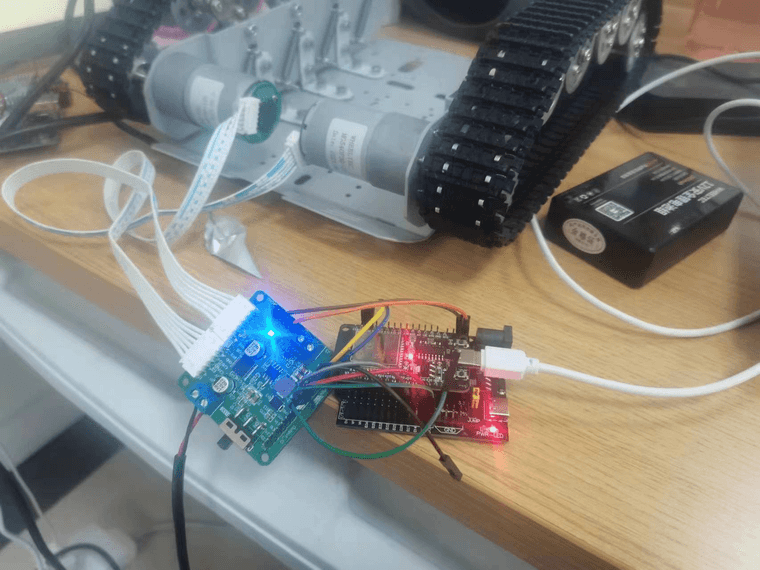
我按照鱼哥的方法导入MCPWM库,代码也是没有错的,为什么电机驱动不起来,难道是我esp32没有自带MCPWM外设?
-
#include <Arduino.h>
#include <Esp32McpwmMotor.h>Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机
const int PIN_STBY = 26;
void setup()
{
Serial.begin(115200); // 初始化串口通信,波特率为115200
pinMode(PIN_STBY,OUTPUT);
motor.attachMotor(0, 23, 22); // 将电机0连接到引脚23和引脚22
motor.attachMotor(1, 12, 13); // 将电机1连接到引脚12和引脚13
}void loop()
{
digitalWrite(PIN_STBY, HIGH);
motor.updateMotorSpeed(0, -70); // 设置电机0的速度(占空比)为负70%
motor.updateMotorSpeed(1, 70); // 设置电机1的速度(占空比)为正70%
delay(2000); // 延迟两秒motor.updateMotorSpeed(0, 70); // 设置电机0的速度(占空比)为正70% motor.updateMotorSpeed(1, -70); // 设置电机1的速度(占空比)为负70% delay(2000); // 延迟两秒}
-
@twj0011001010 请检查硬件