stm32系列MICROROS环境配置(使用cubemx+clion+freertos)
-
我是在cubeide里弄的stm32f407,但是我在将单片机与ubuntu连接后,应该是在这第194行出现了问题
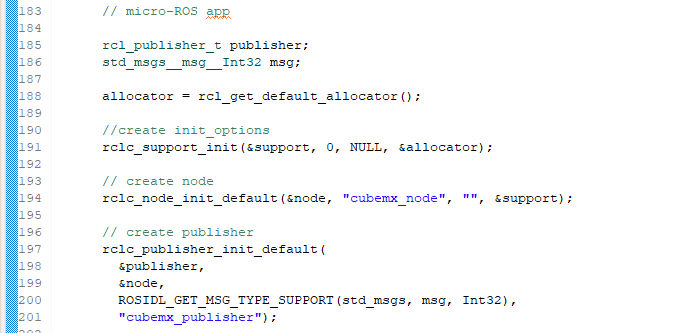
运行agent后将单片机进行复位,此时我电脑上的agent直接报错退出了
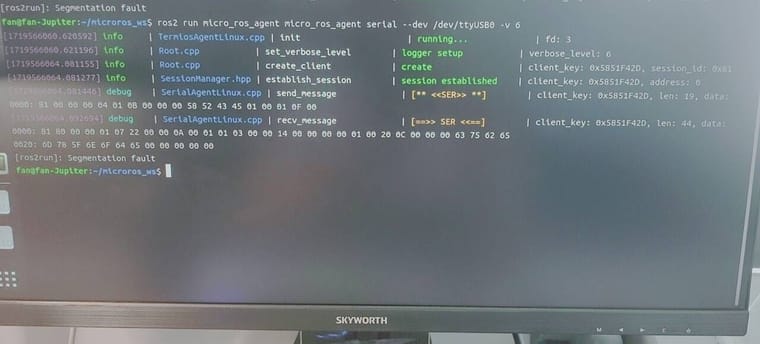
这个不知道是啥问题,我查看了电脑上的串口收到的信息是这样的
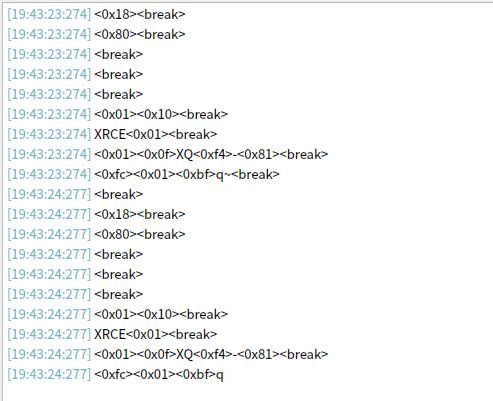
我不知道如何解决 -
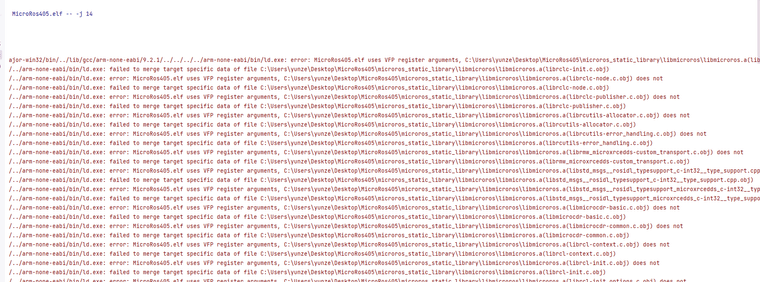
我在stm32 405rgt6上编译,cmake可以通过,但是编译报错。有大佬可以帮我看看 问题在哪里吗?
-
此回复已被删除! -
@1414417391 你好,这个可以先尝试一下断开与stm32的链接,最好是单片机断电,断电后再Linux启动命令,然后再启动stm32
-
@yunze 不好意思,好久没看论坛了,现在您应该是解决了,我现在回复,可以给后续出现相同问题的朋友有点启发
问题其实是f4系列是有硬件浮点的功能,而这个工程用的是软件的,所以要在makefile里面讲硬件浮点修改为软件浮点,具体如何设置可以搜索一下f4芯片使用freertos时使用软件浮点 -
此回复已被删除! -
我目前是用ROS2的Subscriber 範例去抓cubemx_publisher丟出來的資料,在程序中將預設topic改為cubemx_publisher,然後執行ros2 run 文件夾名 listener 後畫面停住沒反應.
請問該如何用Subscriber 去抓cubemx_publisher丟出來的資料?
-
@pireergame 你好,首先我们得确定Linux端的ros使用topic echo 能够看到stm32发送的数据后说明通信已经没问题了,之后再看sub订阅的topic数据类型是否和stm32发送的数据类型是否一致,一般来说这两个都没问题的话已经可以实现订阅了,若是还不行最好就是自己写一个简单的sub订阅者来订阅消息,若是都尝试过的话,请告诉我,我去测试一下(我这边已经可以使用cmdvel话题来进行控制小车运动以及订阅小车反馈的车轮速度)
-
大佬,你stm32rct6,这一套ram占用多少啊?我这用CLion + MX 生成 cmake 项目,一样的配置,占用有 90+%。。。
-
@lupop 没仔细看过,不过配置一样的话应该就差不多,毕竟任务占用大小已经设置10kb了,怎么也小不了

-
2 2475887309 在 中 引用了 这个主题