机械臂仿真
-
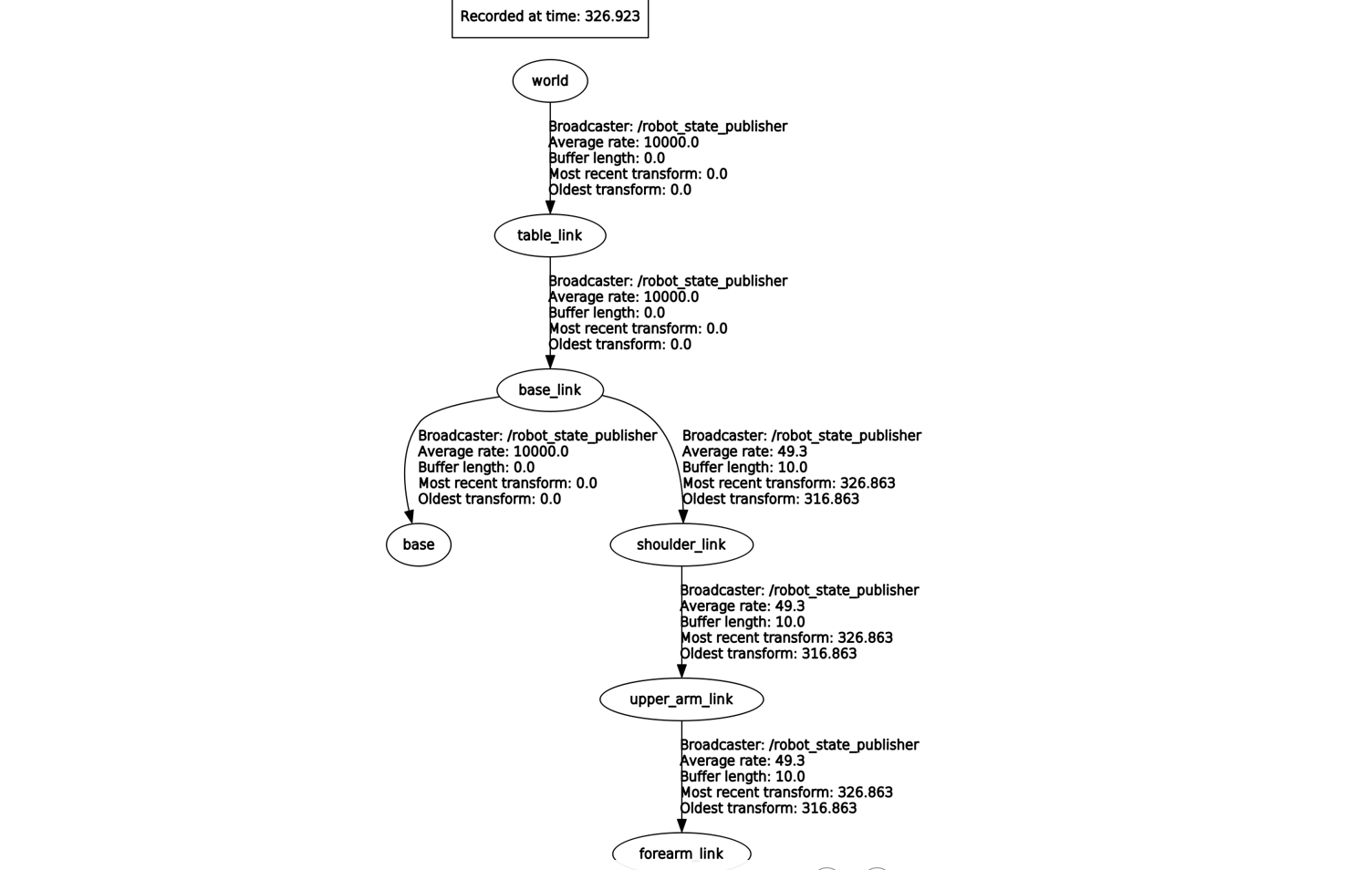
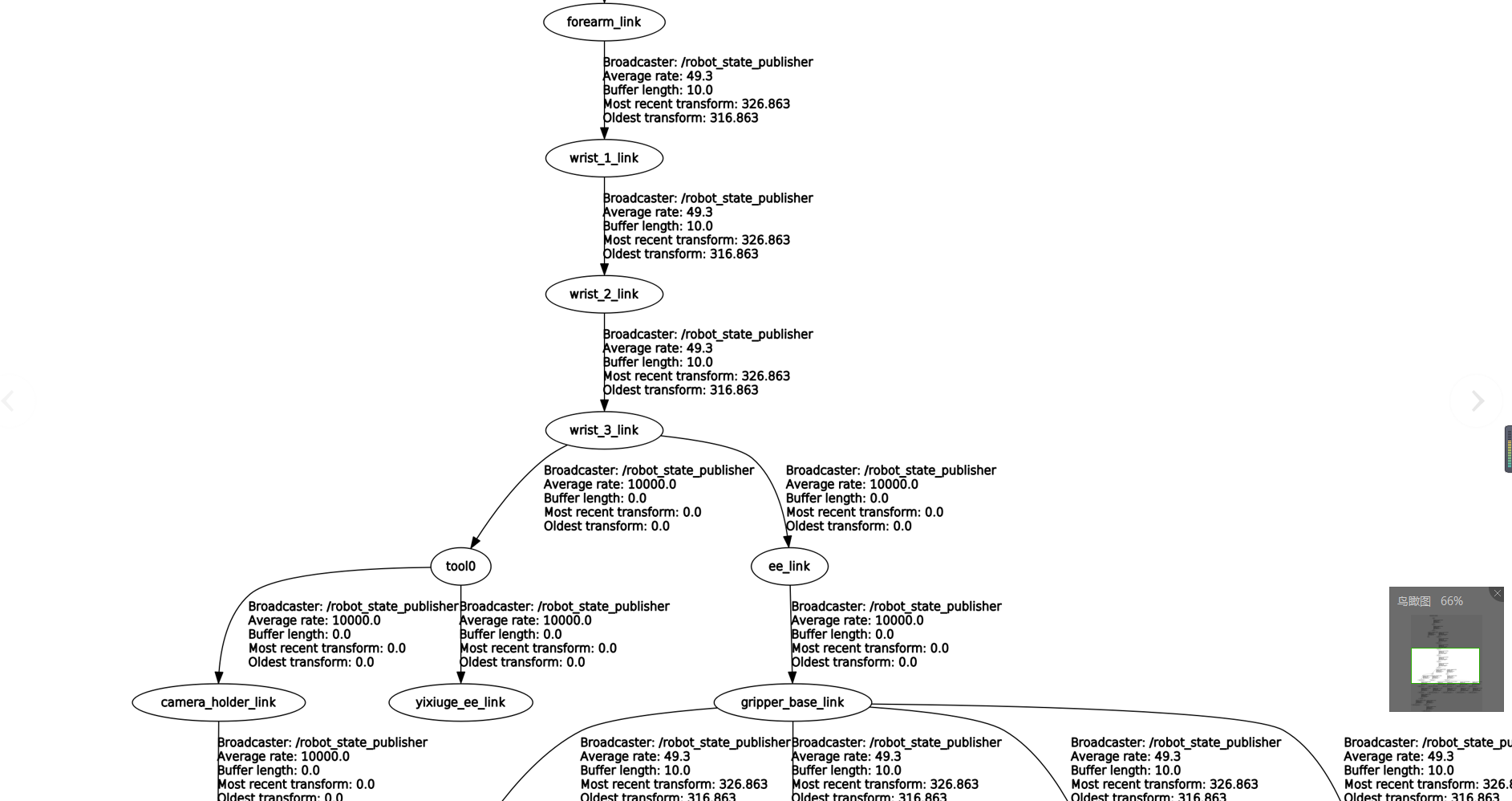
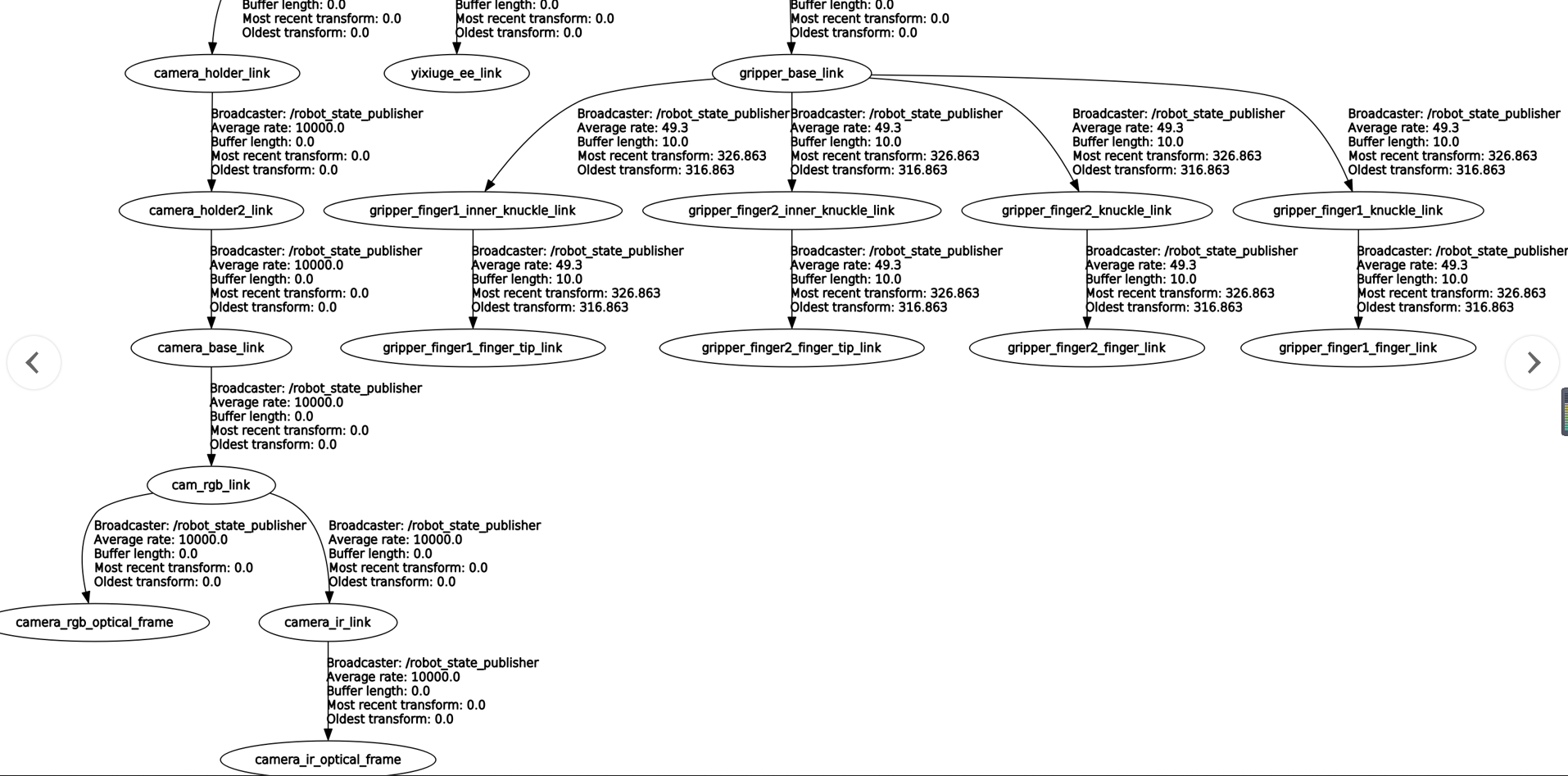
ros@ubuntu:~$ rosrun robot_sim GPD_method_grasp …… …… [ INFO] [1654002341.837162732, 269.526000000]: Ready to take commands for planning group gripper. [ INFO] [1654002345.275566903, 272.206000000]: Ready to take commands for planning group manipulator. [ERROR] [1654002349.392291642, 275.204000000]: "world" passed to lookupTransform argument target_frame does not exist. [ERROR] [1654002349.392369048, 275.204000000]: lookupTransform world to yixiuge_ee_link faild world2tool -0.163850 0.673119 1.545503 -0.000019 0.000075 -0.000087 1.000000 segmentation done! output points size 31944 publish finish!有偿请教这个问题,大佬们帮帮忙
-
@821234877 你应该贴个tf树看看
-
-
-
@821234877 解决了吗,giegie