gmapping 建图求助
-
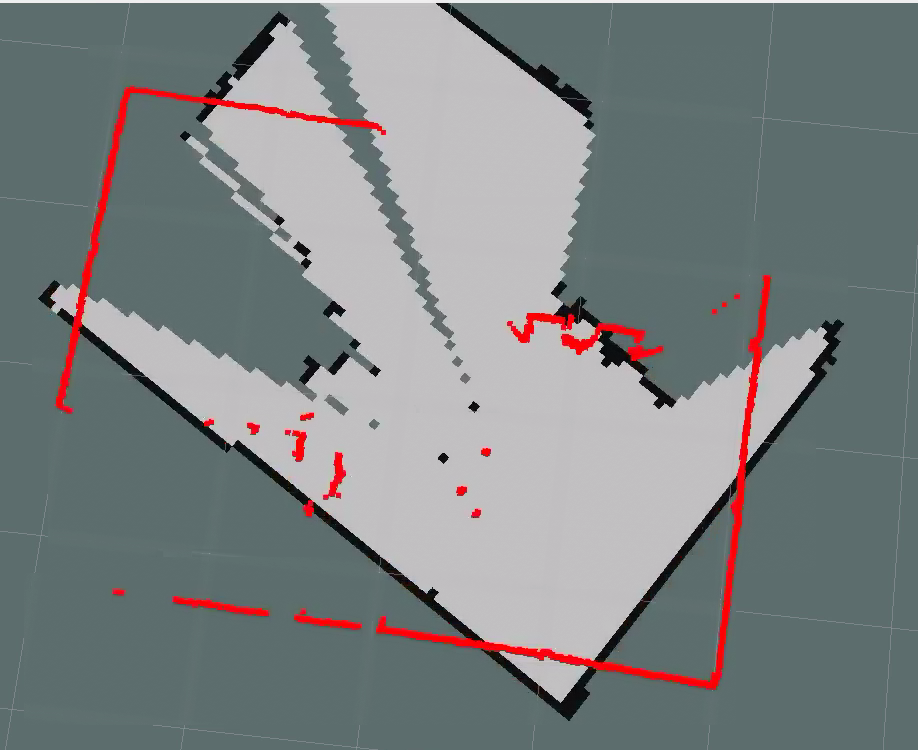
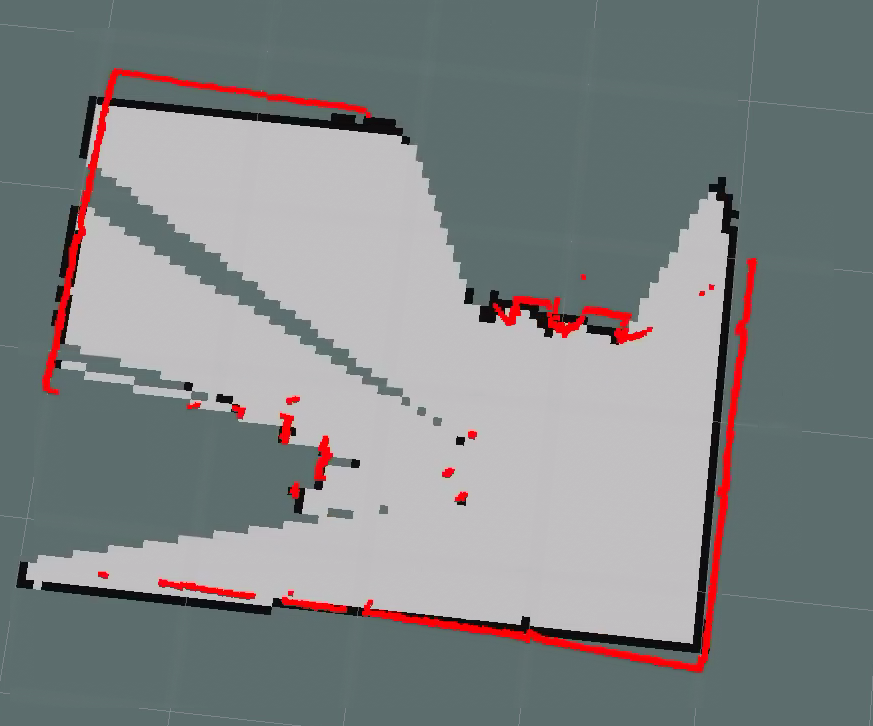
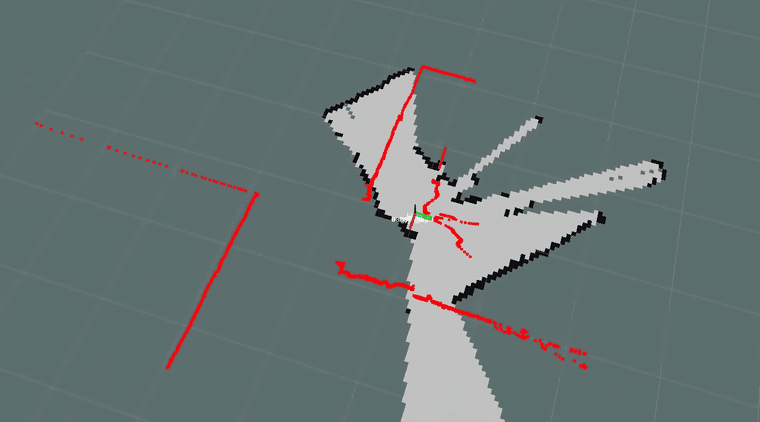
gmapping 建图出现以下情况,打开rviz时有地图数据,接着小车移动,激光雷达和地图就不匹配,后面/map话题也不输出新的数据了。
-
车辆的定位不准吧,查一下里程计的精度和imu的角速度
-
@2215324833
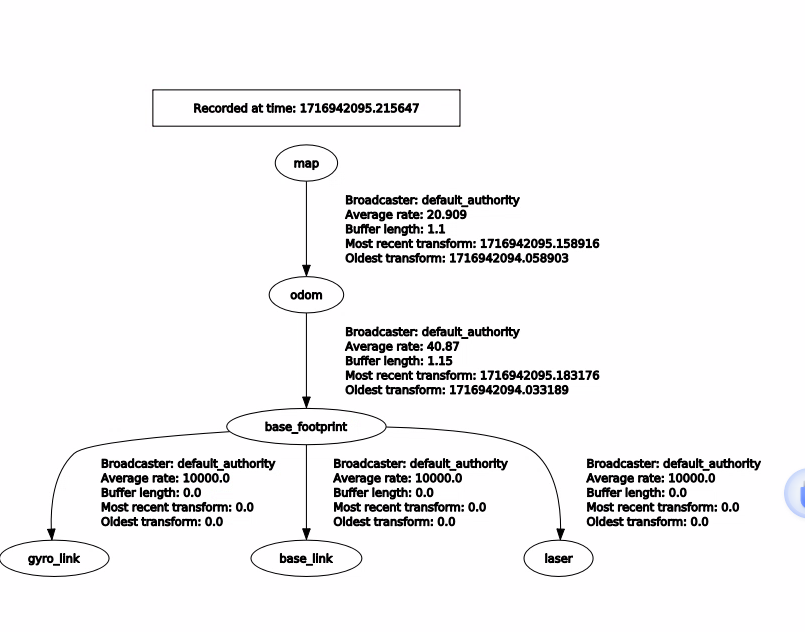
odom 的position 我校验了一下,直线走非常的准,imu的角速度不知道咋校验。现在还是不能建图,刚打开gmapping的时候可以建图,后面移动小车地图不继续补全。 不知道是不是雷达数据频率太高了,而且我的tf转换显示laser没做变换
。但是不知道为什么,也不知道这个broadcaster为啥不显示是谁广播的。