fishbot导航是在建好的地图上,通过2D Pose Estimate来初始化位置,Nav2 Goal来设置导航目标点,那可不可以通过在规划器中更改代码实现小车初始位置和goal呢
-
一直以来有一个问题,fishbot导航是在建好的地图上,通过2D Pose Estimate来初始化位置,Nav2 Goal来设置导航目标点,那可不可以通过在规划器中更改代码实现小车初始位置和goal呢
-
@2524167316 不是很理解你的意思
-
@小鱼 鱼哥,我准备使用fishbot小车捡网球,摄像头经过yolo识别出是一个网球,就给fishbot小车一个nav2 goal,小车就能直接到网球的位置,这个应该怎么改nav2的源码呢
-
@2524167316 首先要从2d摄像头无法估计出深度信息,所以你很难实现,假如你获取到网球相对机器人的坐标,计算该坐标在地图中的位置,接着发送给机器人导航就行了。
-
@小鱼 鱼哥,我准备采用激光测距的方法获得网球相对于机器人的距离,现在困惑的就是知道网球在地图中的位置后怎么把位置给机器人,是要改nav2的哪部分代码呀
-
@2524167316 不用改任何代码,nav2提供的有command可以调用导航接口,也可以直接用action实现
-
@小鱼 好的,感谢鱼哥
-
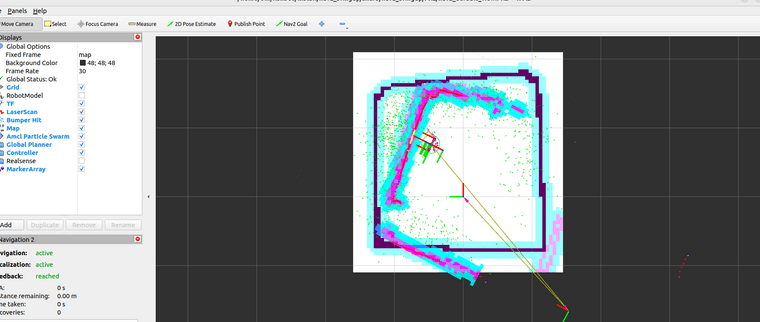
@小鱼 在 [fishbot导航是在建好的地图上,通过2D Pose Estimate来初始化位 鱼哥,我把雷达的位置改了放到了以前主控板的地方,现在能够通过雷达扫描到网球的位置,并计算得到了网球在地图中的位置,但是我把这个位置发给机器人导航,却出现了地图特别飘的情况,机器人不能准确地到达网球的位置
-
@2524167316 在 fishbot导航是在建好的地图上,通过2D Pose Estimate来初始化位置,Nav2 Goal来设置导航目标点,那可不可以通过在规划器中更改代码实现小车初始位置和goal呢 中说:
雷达的位置改了放到了以前主控板的地方
雷达位置改变,一定要修改urdf匹配雷达的位置,另外观察是否有遮挡之类的
-
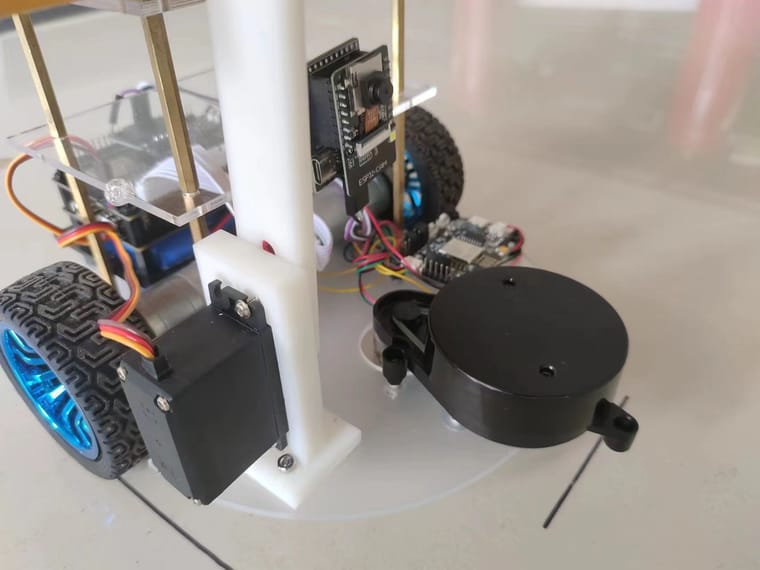
@小鱼 我改成了这个样子,雷达驱动因为是docker,所以雷达的参数文件没有改,但urdf文件改了
-
@2524167316 如果urdf改的没问题,按理导航不会有太大差异,需要注意的是雷达的遮挡问题。
-
@小鱼 你好,我可以请教一下你这个接线是怎么接的吗?