@小鱼 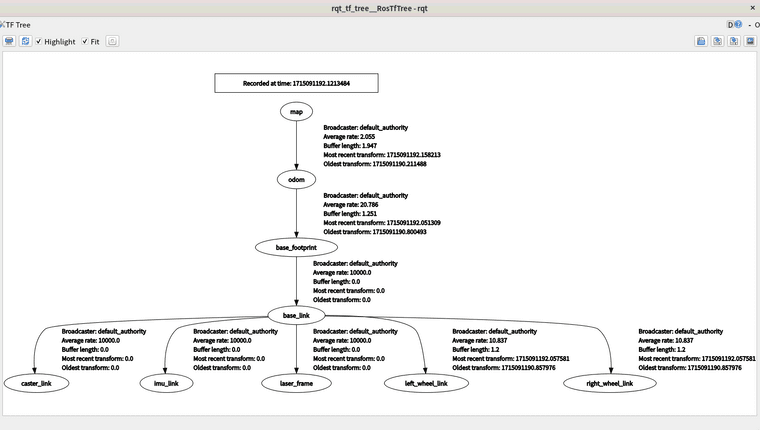 之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图
之前发现/odom有话题,但是没有数据传过来,现在/odom有数据了,但是还是建不了图
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2524167316 发布的最新帖子
-
RE: 拓展3:FishBot 树莓派配置建图导航发布在 FishBot机器人
@小鱼 [async_slam_toolbox_node-1] [INFO] [1714996759.771290017] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1714996759.626 for reason 'discarding message because the queue is full'
我现在是用树莓派当上位机通过串口与主控板和雷达驱动板通信,树莓派用的是4b的,没有固件库,因为我没用wifi通信,一直报上面的错误 -
RE: 拓展3:FishBot 树莓派配置建图导航发布在 FishBot机器人
鱼哥,我雷达和主控板都是通过串口与树莓派进行通信的,前几步都没问题,但是我运行ros2 launch slam_toolbox online_async_launch.py就一直出现这个问题,换成cartograph建图也是报错,能出现map,但是不是实时更新

-
使用tool__box建图,按照步骤来的,前面都没错,但是运行ros2 launch slam_toolbox online_async_launch.py后,启动rviz2就开始报错发布在 移动机器人制作
User
olh@olh-desktop:~$ ros2 launch slam_toolbox online_async_launch.py
[INFO] [launch]: All log files can be found below /home/olh/.ros/log/2024-05-04-21-51-00-836468-olh-desktop-4350
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [async_slam_toolbox_node-1]: process started with pid [4351]
[async_slam_toolbox_node-1] [INFO] [1714830661.215165715] [slam_toolbox]: Node using stack size 40000000
[async_slam_toolbox_node-1] [INFO] [1714830661.373611485] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[async_slam_toolbox_node-1] [INFO] [1714830661.374160134] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[async_slam_toolbox_node-1] [INFO] [1714830661.696277555] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1714830661.507 for reason 'discarding message because the queue is full'
[async_slam_toolbox_node-1] [INFO] [1714830661.862008135] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1714830661.672 for reason 'discarding message because the queue is full'可能是use_sim_time=true的问题,但是我不知道是不是要在雷达启动的launch文件加use_sim_time=true还是
-
想用树莓派做上位机与移动机器人进行通信发布在 FishBot机器人
我的思路是这样的,把树莓派当上位机,在树莓派上安装ubuntu系统,通过在树莓派上运行代码,然后用树莓派与移动机器人进行通信,现在就是不清楚是只能通过像教程那样的通过WIFI进行通信,还是可以通过can总线进行通信
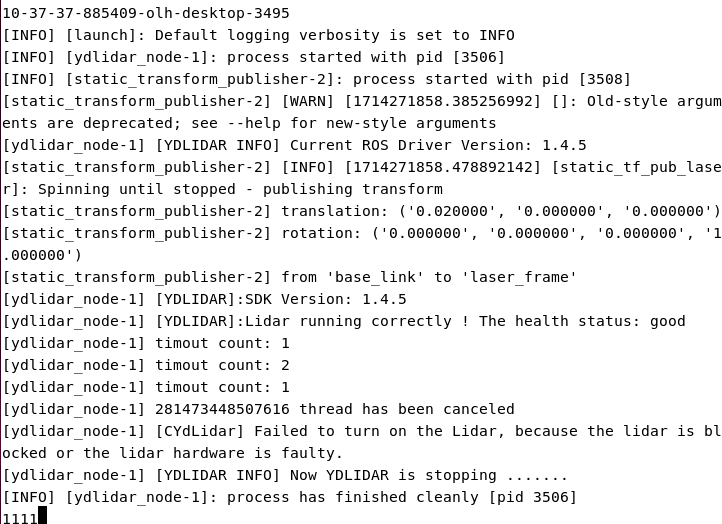
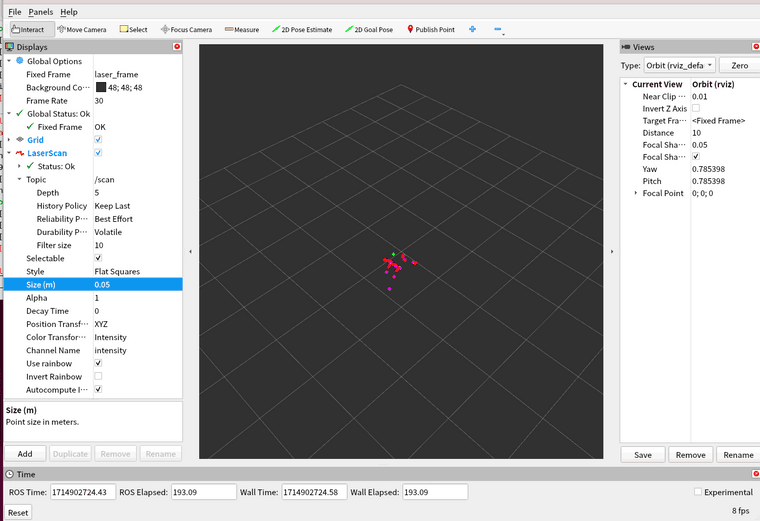 雷达能正常运行,但是死活就是不能建图
雷达能正常运行,但是死活就是不能建图 出现的map是这样的,不能实时更新,不知道哪里出来问题
出现的map是这样的,不能实时更新,不知道哪里出来问题