fishbot导航地图特别飘,定位不准
-
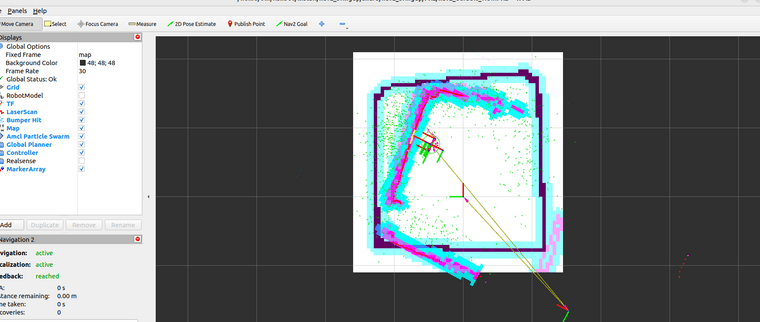
fishbot导航的时候地图特别飘,第一个nav2_goal还好,后面的话已经完全定位不准了,这是因为我nav2_yaml导航的参数没设置好还是什么呀
-
Fishbot导航时地图特别飘,且后续定位不准确的问题,可能由多种因素导致。关于您提到的nav2_yaml导航参数设置,这确实是一个需要关注的方面。导航参数的合理配置对于机器人的精确定位和稳定导航至关重要。如果参数设置不当,可能会导致定位漂移、导航不稳定等问题。
具体来说,nav2_yaml文件中的参数涉及路径规划、行为树导航等多个方面。例如,planner_server节点的参数会影响路径规划器的性能,包括地图的加载、规划器类型的选择以及规划时间的设置等。如果这些参数设置不合理,可能会影响机器人的导航精度和稳定性。
另外,bt_navigator节点的参数也会影响行为树导航器的性能,包括行为树的文件路径、调试模式等。如果行为树的逻辑设置不正确或者调试模式未正确启用,也可能会导致导航问题。
除了参数设置外,还有其他因素可能影响Fishbot的导航性能,例如:
- 传感器数据:机器人的传感器数据对于定位至关重要。如果传感器数据不准确或受到干扰,可能会导致定位漂移。
- 环境因素:导航环境的复杂性、光照条件、障碍物分布等都可能影响机器人的导航性能。
- 机器人硬件:机器人的硬件性能,如处理器速度、内存大小等,也可能影响导航的稳定性和精度。
因此,要解决Fishbot导航时地图飘和定位不准的问题,您可以尝试以下方法:
- 检查并优化nav2_yaml文件中的参数设置,确保它们适应您的导航环境和需求。
- 检查机器人的传感器数据,确保它们准确且未受到干扰。
- 评估导航环境的复杂性,并尝试简化环境或优化机器人的路径规划策略。
- 检查机器人的硬件性能,并根据需要进行升级或优化。
请注意,导航系统的调试和优化是一个复杂的过程,可能需要多次尝试和调整才能找到最佳解决方案。如果您在调整参数或解决导航问题时遇到困难,建议查阅相关文档或寻求专业人士的帮助。
以上为生成回答,仅供参考~
-
@2524167316 可以做如下尝试
1.切换最新版本的固件试试
2.更换更好的网络环境
3.尝试校准轮式里程计 -
@小鱼 鱼哥,影响最大的可能是网络环境吗,我是用的手机开的热点,我如果手动给nav2_goal的话,地图不会很飘,但是我如果用程序通过雷达得到网球的位置,发给导航机器人,这样地图就真的非常飘
-
@2524167316 网络是一个因素,但还可能有其他因素,你最好按照提问要求,提供所有的上下文和尽可能多的信息。
https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
标题:[清晰而简洁地总结您的问题]
提问模板(建议直接复制粘贴):
背景(可选):
[在这里描述你要实现什么,也许有更好的方案]
问题描述:
[在这里详细描述您遇到的问题。请确保您提供了足够的背景信息,以便其他人能够理解您的问题。]
具体细节和上下文:
- [列出任何相关细节或前后操作,以帮助回答者更好地理解您的问题。]
- [如果可能,请提供与您问题相关的链接或参考资料。]
尝试过的解决方法:
- [描述您已经尝试过的任何解决方法或方法。这可以帮助其他人了解您遇到问题的具体情况,并避免给出与您已经尝试过的解决方案相同的答案。]