ros2中rviz无地图显示frame[map]does not exist
-
1.使用turtlebot3仿真环境建好图后,无法加载地图,且导航也无法启动
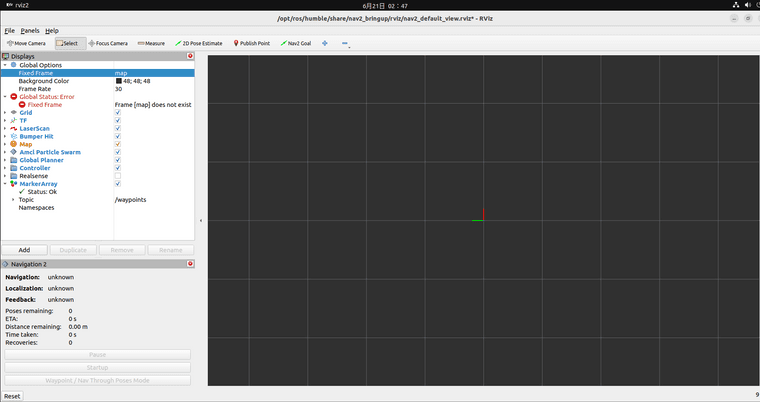
2.rviz终端一直重复显示一下内容

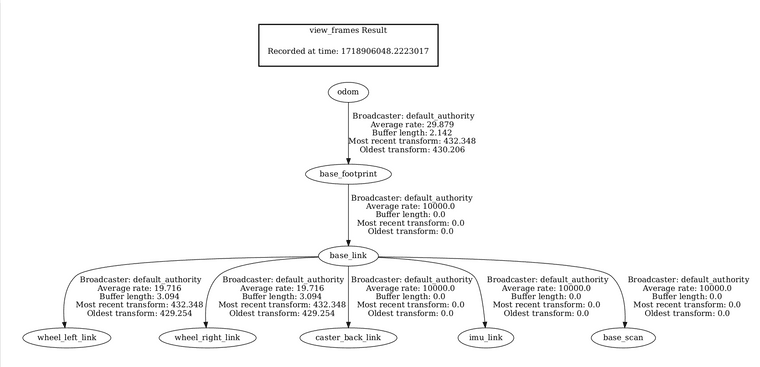
3.tf树中无map坐标系
-
在ROS 2中,当您使用turtlebot3仿真环境进行建图,但rviz无法加载地图且导航无法启动时,同时rviz终端显示“frame [map] does not exist”的错误,并且tf树中没有map坐标系,这通常意味着RViz试图访问一个不存在的坐标系。以下是一些可能的解决方案:
-
确保地图话题发布:
- 检查是否有节点正在发布
/map话题。如果没有,那么rviz无法加载地图,因为它需要这个话题来获取地图数据。 - 使用
ros2 topic list来查看当前所有话题的列表,确保/map话题存在。 - 如果
/map话题不存在,您需要检查建图节点是否正在运行并成功发布地图数据。
- 检查是否有节点正在发布
-
检查tf变换:
- 地图通常关联到一个名为
map的固定坐标系。tf(Transform)用于处理不同坐标系之间的转换。 - 使用
ros2 run tf2_ros tf2_echo base_link map(或相应的坐标系)来查看base_link和map之间的变换是否存在。 - 如果没有tf变换,可能是因为没有节点发布这些变换,或者变换链中存在中断。
- 地图通常关联到一个名为
-
设置静态变换:
- 如果tf树中没有
map坐标系,您可能需要手动添加一个静态变换来告诉RVizmap坐标系相对于其他坐标系(如odom或base_link)的位置。 - 使用
static_transform_publisher节点来发布静态变换。例如,如果您知道base_link和map之间的相对位置,可以发布一个静态变换来模拟这个关系。
- 如果tf树中没有
-
检查RViz配置:
- 在RViz中,确保您选择了正确的Fixed Frame(固定坐标系)。如果
map坐标系不存在,尝试选择一个存在的坐标系,如odom或base_link,然后查看是否能够加载其他数据。
- 在RViz中,确保您选择了正确的Fixed Frame(固定坐标系)。如果
-
检查导航配置文件:
- 确保导航配置文件(如
costmap_common_params.yaml和local_costmap_params.yaml等)中的坐标系设置正确。
- 确保导航配置文件(如
-
检查机器人状态:
- 确保机器人状态正常,且所有传感器和驱动器都在工作。
-
重新启动仿真和节点:
- 有时,重新启动仿真环境和所有相关节点可以解决一些临时性的问题。
-
查看日志和错误消息:
- 使用
ros2 launch或ros2 run命令的--screen选项来查看节点的输出,这可能会提供更多关于问题的线索。
- 使用
-
检查ROS 2版本和包兼容性:
- 确保您使用的ROS 2版本与turtlebot3的仿真包和其他相关包兼容。
如果您尝试了上述所有步骤,但问题仍然存在,可能需要更深入地检查您的机器人配置、仿真环境以及RViz的设置。在一些情况下,可能需要查看ROS 2社区论坛或GitHub issues,看看是否有其他人遇到了类似的问题,并找到了解决方案。
以上为生成回答,仅供参考~
-
-
您好,我也遇到这个问题,请问你解决了吗
-
如果你使用的是turtlebot3_navigation2/navigation2.launch.py导航,问题大概出在这里,turtlebot3_navigation2/navigation2.launch.py基于nav2_bringup/bringup_launch.py,但两者载入的params_file并不同,turtlebot3_navigation2/navigation2.launch.py声明了params_file的参数,你可以直接在命令中将其改为nav2_bringup的params/nav2_params.yaml,设置初始位姿后问题就可以解决了。
具体问题可以对比turtlebot3_navigation2和nav2_bringup的params_file,我没有细看。