Nav2导航时出现 Rviz2打开后无反应的情况
-
背景(可选):
ubuntu 22.04 实体机
网络架构:笔记本用网线连接路由器,fish连接局域网问题描述:
Rviz界面可以正常打开,但是无法使用 2D Pose estimate功能定位当前位置,也无法使用nav2 goal导航功能
用rqt tf tree命令输入终端打不开树图
具体细节和上下文:
Agent:
雷达:
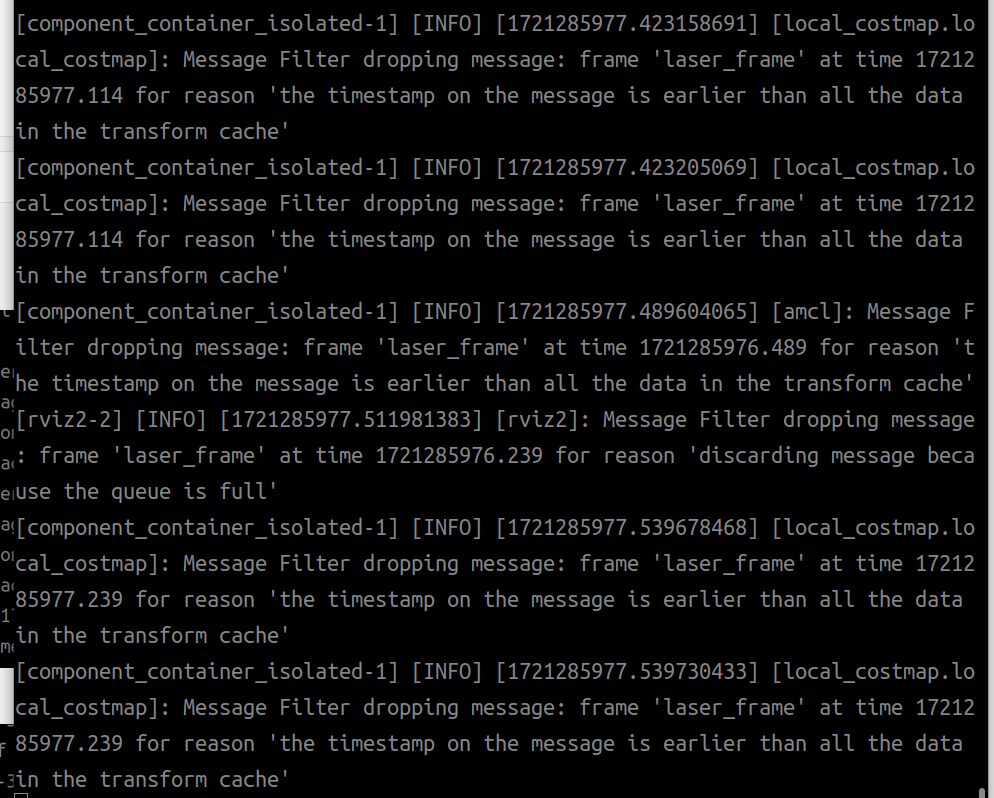
导航launch:
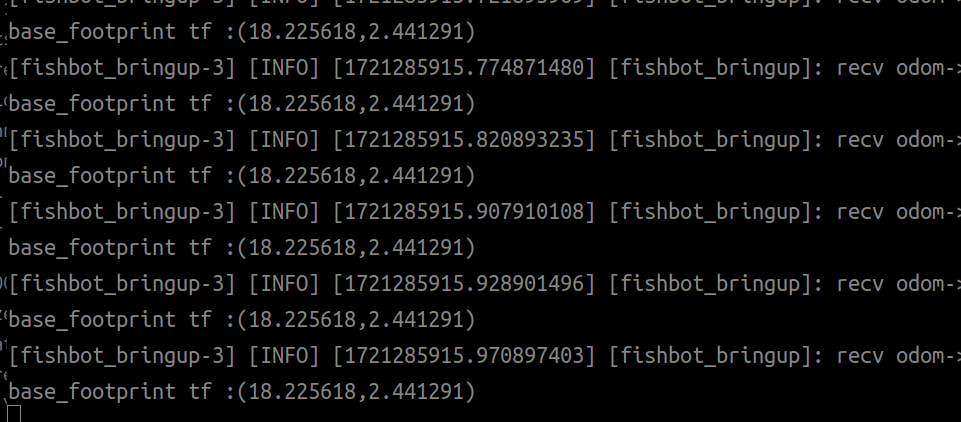
odom tf:
-
针对Nav2导航时Rviz2打开后无反应,以及2D Pose estimate功能和nav2 goal导航功能无法使用的问题,以下是一些可能的解决步骤和建议:
-
检查Rviz2的配置:
- 确保在Rviz2中正确加载了所有的必要插件和配置项,如“laser scan”和“pointCloud”等。
- 检查是否已经订阅了正确的主题来获取激光雷达数据、odom数据和其他必要的导航信息。
-
检查网络连接:
- 由于您的网络架构是笔记本用网线连接路由器,fish连接局域网,可能存在网络延迟或不稳定的问题。请确保网络连接稳定,并且所有相关设备(包括ROS节点)都能正确通信。
-
检查tf变换:
- 由于您提到
rqt tf tree命令无法打开树图,这通常意味着tf变换存在问题。请确保所有的tf广播者(如odom发布者)都在正常运行,并且tf变换链是完整的。 - 可以在终端中使用
rosrun tf view_frames来查看当前的tf变换树,这有助于识别问题所在。
- 由于您提到
-
检查导航launch文件:
- 检查您的导航launch文件是否正确配置了所有必要的节点和参数,如move_base、amcl等。
- 确保所有的传感器数据(如激光雷达数据)都被正确地传递给导航堆栈。
-
检查坐标系:
- 如参考文章7所述,确保在Rviz2中选择了正确的坐标系。错误的坐标系可能会导致无法正确显示数据或执行导航任务。
-
检查ROS环境变量:
- 确保ROS_MASTER_URI和ROS_HOSTNAME等环境变量被正确设置,以便ROS节点能够正确地找到彼此。
-
检查日志和错误信息:
- 仔细查看ROS的日志和终端中的错误信息,这可能会提供关于问题的线索。
- 如果可能的话,尝试在Rviz2和导航节点中启用更详细的调试输出。
-
重启和重置:
- 尝试重启Rviz2和相关的ROS节点,有时候简单的重启就能解决问题。
- 如果问题仍然存在,考虑重置导航堆栈的状态(如清空costmaps等),然后重新开始。
-
更新和修复:
- 确保您的ROS发行版和Nav2导航堆栈都是最新的,并且没有已知的bug。
- 如果可能的话,尝试在另一个ROS环境中复现问题,以排除特定于您当前环境的问题。
-
寻求帮助:
- 如果以上步骤都无法解决问题,考虑在ROS社区或相关论坛中寻求帮助。在提问时,提供尽可能多的详细信息和上下文,以便他人更好地理解您的问题。
以上为生成回答,仅供参考~
-
-
@1195326523 在 Nav2导航时出现 Rviz2打开后无反应的情况 中说:
Rviz界面可以正常打开,但是无法使用 2D Pose estimate功能定位当前位置,也无法使用nav2 goal导航功能
提供一下详细的Nav2日志,从启动开始的,看看是不是有哪里没加载。另外nav2的相关代码程序你是怎么获取的,另外检查下话题列表和速率。
最后尽量不要截图:https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答