一键安装里没有ros1可选项(20.04/18.04)
-
标题:一键安装里没有ros1可选
问题描述:
如图,在ubuntu20.04和ubuntu18.04里都尝试了,但发现没有能一件安装的ros1版本,就很奇怪。前几个月还是有的我记得
想来问问原因
-
@小鱼 谢谢小鱼,我看到‘apt does not have a stable CLI interface’警告之后把校园网换成了自己的热点,然后就成功出现ros1了,可能是我们学校的校园网有点bug与apt连接不稳定,现在已经解决!

-
在Ubuntu 20.04和Ubuntu 18.04中,如果你发现无法通过一键安装找到ROS 1的选项,可能有几个原因:
- 软件源配置:首先,确保你的Ubuntu系统已经配置了正确的ROS软件源。对于ROS 1,你可能需要添加如
http://packages.ros.org/ros/ubuntu这样的软件源到你的sources.list或sources.list.d目录中。这可以通过执行类似以下命令来实现(以ROS Melodic为例,这是ROS 1在Ubuntu 18.04上的版本):
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'对于Ubuntu 20.04,你可能需要使用ROS Noetic版本。
- 密钥添加:在添加软件源后,你还需要添加ROS的GPG密钥到你的系统中,以便验证软件包的完整性。这可以通过以下命令完成:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654注意,密钥可能会因ROS版本的不同而有所变化。
- 软件源更新:在尝试安装ROS之前,请确保你的软件包列表是最新的。你可以使用以下命令来更新软件包列表:
sudo apt update- 安装ROS:一旦你的系统配置正确,你就可以使用
apt来安装ROS了。例如,要安装ROS Melodic的Desktop-Full版本,你可以运行:
sudo apt install ros-melodic-desktop-full对于Ubuntu 20.04,你应该使用ROS Noetic的版本。
- 环境问题:如果上述步骤都正确无误,但你的“一键安装”工具仍然找不到ROS 1的选项,那么可能是该工具的问题。不同的“一键安装”工具可能有不同的版本支持和更新频率。在这种情况下,你可能需要手动按照ROS的官方安装指南进行安装,或者使用其他可靠的安装方法。
- 时间因素:你提到前几个月还有ROS 1的选项,但现在没有了。这可能是因为ROS 1的某些版本在新版本的Ubuntu中不再受到官方支持,或者你的“一键安装”工具已经更新,移除了对ROS 1的支持。请检查ROS的官方文档和“一键安装”工具的更新日志,以获取更多信息。
希望这些建议能帮助你解决问题!
以上为生成回答,仅供参考~
- 软件源配置:首先,确保你的Ubuntu系统已经配置了正确的ROS软件源。对于ROS 1,你可能需要添加如
-
@2805188071 提供下完整的日志的信息,全部复制粘贴下日志,晚点我也测试一下
-
@小鱼 刚刚把虚拟机移除了,稍等我重装一下20.04
-
每次终端打开第一遍开启一键安装都会失败,如下:
slam@ubuntu:~$ wget http://fishros.com/install -O fishros && . fishros
--2024-07-24 06:13:09-- http://fishros.com/install
Resolving fishros.com (fishros.com)... 47.119.165.169
Connecting to fishros.com (fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 301 Moved Permanently
Location: http://fishros.com/install/ [following]
--2024-07-24 06:13:11-- http://fishros.com/install/
Reusing existing connection to fishros.com:80.
HTTP request sent, awaiting response... 200 OK
Length: 987 [text/html]
Saving to: ‘fishros’fishros 100%[===================>] 987 --.-KB/s in 0s
2024-07-24 06:13:11 (58.3 MB/s) - ‘fishros’ saved [987/987]
bash: html: No such file or directory
bash: head: No such file or directory
bash: fishros: line 3: syntax error near unexpected token(' bash: fishros: line 3:<script language="javascript">setTimeout("try{setCookie();}catch(error){};location.replace(location.href.split("#")[0])",2000);</scrip'> -
第二遍开启一键安装成功,不过没有ros1可选如下:(ubuntu20.04,ustc源)
slam@ubuntu:~$ wget http://fishros.com/install -O fishros && . fishros
--2024-07-24 06:13:13-- http://fishros.com/install
Resolving fishros.com (fishros.com)... 47.119.165.169
Connecting to fishros.com (fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 301 Moved Permanently
Location: http://fishros.com/install/ [following]
--2024-07-24 06:13:13-- http://fishros.com/install/
Reusing existing connection to fishros.com:80.
HTTP request sent, awaiting response... 200 OK
Length: 579 [application/octet-stream]
Saving to: ‘fishros’fishros 100%[===================>] 579 --.-KB/s in 0s
2024-07-24 06:13:13 (94.3 MB/s) - ‘fishros’ saved [579/579]
[sudo] password for slam:
Reading package lists... Done
Building dependency tree
Reading state information... Done
python3-distro is already the newest version (1.4.0-1).
python3-distro set to manually installed.
python3-yaml is already the newest version (5.3.1-1ubuntu0.1).
python3-yaml set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 282 not upgraded.
--2024-07-24 06:13:18-- http://mirror.fishros.com/install/tools/base.py
Resolving mirror.fishros.com (mirror.fishros.com)... 47.119.165.169
Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 44650 (44K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/base.py’/tmp/fishinstall/tools/base.py 100%[==============================================================================================>] 43.60K --.-KB/s in 0.08s
2024-07-24 06:13:18 (553 KB/s) - ‘/tmp/fishinstall/tools/base.py’ saved [44650/44650]
Run CMD Task:[dpkg --print-architecture]
[-]Result:successRun CMD Task:[wget https://fishros.org.cn/forum/topic/1733 -O /tmp/t1733 -q && rm -rf /tmp/t1733]
[-]Result:success基础检查通过...
======欢迎使用一键安装工具,人生苦短,三省吾身,省时省力省心!=======
======一键安装已开源,请放心使用:https://github.com/fishros/install =======.-~~~~~~~~~-._ _.-~~~~~~~~~-. __.' ~. .~ `.__ .'// 开卷有益 \./ 书山有路 \ `. .'// 可以多看看小鱼的文章 | 关注公众号鱼香ROS \ `. .'// .-~~~~~~~~~~~~~~-._ | _,-~~~~~~~~~~~. \`. .'//.-" `-. | .-' "-.\`. .'//______.============-.. \ | / ..-============.______\`. .'______________________________\|/______________________________` ----------------------------------------------------------------------RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
[11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
[16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)常用软件:
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[6]:一键安装:NodeJS环境
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[14]:一键安装:科学上网代理工具
[15]:一键安装:QQ for Linux配置工具:
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[13]:一键配置:python国内源
[17]:一键配置: Docker代理(支持VPN+代理服务两种模式)请输入[]内的数字以选择:1
--2024-07-24 06:13:39-- http://mirror.fishros.com/install/tools/tool_install_ros.py
Resolving mirror.fishros.com (mirror.fishros.com)... 47.119.165.169
Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 19723 (19K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_install_ros.py’/tmp/fishinstall/tools/tool_install_ros.py 100%[==============================================================================================>] 19.26K --.-KB/s in 0.04s
2024-07-24 06:13:39 (512 KB/s) - ‘/tmp/fishinstall/tools/tool_install_ros.py’ saved [19723/19723]
--2024-07-24 06:13:39-- http://mirror.fishros.com/install/tools/tool_config_rosenv.py
Resolving mirror.fishros.com (mirror.fishros.com)... 47.119.165.169
Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 2455 (2.4K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_config_rosenv.py’/tmp/fishinstall/tools/tool_config_rosenv.py 100%[==============================================================================================>] 2.40K --.-KB/s in 0s
2024-07-24 06:13:41 (243 MB/s) - ‘/tmp/fishinstall/tools/tool_config_rosenv.py’ saved [2455/2455]
--2024-07-24 06:13:41-- http://mirror.fishros.com/install/tools/tool_config_system_source.py
Resolving mirror.fishros.com (mirror.fishros.com)... 47.119.165.169
Connecting to mirror.fishros.com (mirror.fishros.com)|47.119.165.169|:80... connected.
HTTP request sent, awaiting response... 200 OK
Length: 7738 (7.6K) [application/octet-stream]
Saving to: ‘/tmp/fishinstall/tools/tool_config_system_source.py’/tmp/fishinstall/tools/tool_config_system_sou 100%[==============================================================================================>] 7.56K --.-KB/s in 0.001s
2024-07-24 06:13:41 (8.57 MB/s) - ‘/tmp/fishinstall/tools/tool_config_system_source.py’ saved [7738/7738]
欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供
欢迎使用ROS开箱子工具,本工具由[鱼香ROS]小鱼贡献..
小鱼:检测当前系统ubuntu20.04:focal 支持一键安装ROS
=========接下来这一步很很很很重要,如果不知道怎么选请选择1========
RUN Choose Task:[请输入括号内的数字]
新手或首次安装一定要一定要一定要换源并清理三方源,换源!!!系统默认国外源容易失败!!
[1]:更换系统源再继续安装
[2]:不更换继续安装
0:quit
请输入[]内的数字以选择:2
Run CMD Task:[sudo apt update]
[-]Result:success st --upgradable' to see them.Run CMD Task:[sudo apt search curl ]
[-]Result:success tu3 amd64ck app4ntu1~bpo0-0ubuntu0.20.04 amd64bpo0-0ubuntu0.20.04 alll alllRun CMD Task:[sudo apt install curl -y]
[-]Result:success buntu9.9) ...deb ... ...ed.)l amd64 7.68.0-1ubuntu2.22 [161 kB] kB]Run CMD Task:[sudo apt search gnupg2 ]
[-]Result:success ent (dummy transitional package)ubuntu2.2 allRun CMD Task:[sudo apt install gnupg2 -y]
[-]Result:success ...u2.2_all.deb ...stalled.) gnupg2 all 2.2.19-3ubuntu2.2 [5,316 B]Run CMD Task:[curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -]
[-]Result:successRun CMD Task:[dpkg --print-architecture]
[-]Result:success根据您的系统,为您推荐安装源为['http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/', 'http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/']
创建文件:/etc/apt/sources.list.d/ros-fish.list
Run CMD Task:[sudo apt update]
[-]Result:code:100 ros2/ubuntu focal/main amd64 Packages [1,192 kB]apt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/dists/focal/InRelease Clearsigned file isn't valid, got 'NOSPLIT' (does the network require authentication?)\n", "E: The repository 'http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal InRelease' is not signed.\n"]
Run CMD Task:[sudo apt search ros-base ]
[-]Result:success includes other basic functionalities like tf2 and urdf.恭喜,成功添加ROS源,接下来可以使用apt安装ROS或者使用[1]一键安装ROS安装!
Run CMD Task:[sudo apt search ros-base ]
[-]Result:success includes other basic functionalities like tf2 and urdf.RUN Choose Task:[请输入括号内的数字]
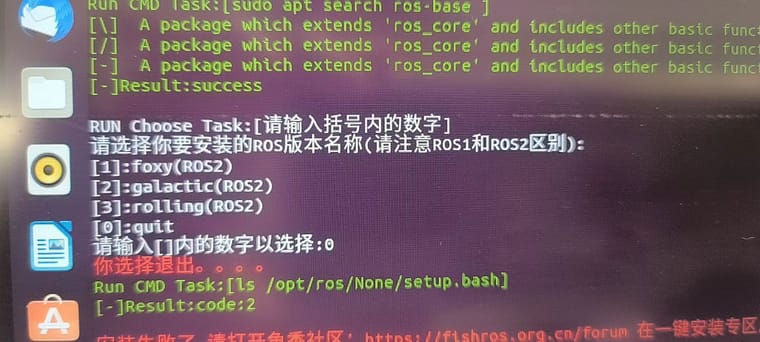
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:foxy(ROS2)
[2]:galactic(ROS2)
[3]:rolling(ROS2)
0:quit
请输入[]内的数字以选择:0
你选择退出。。。。
Run CMD Task:[ls /opt/ros/None/setup.bash]
[-]Result:code:2安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题...
Run CMD Task:[ls /opt/ros/None/setup.bash]
[-]Result:code:2欢迎加入机器人学习交流QQ群:438144612(入群口令:一键安装)
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或打开链接查看:https://item.taobao.com/item.htm?id=696573635888
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈 -
@2805188071 三个选项都是ros2没有ros1...
-
@2805188071 奇怪了,我刚测试的18
Run CMD Task:[sudo apt update] [-]Result:success -upgradable’ 来查看它们。 amd64 Packages [809 kB] Run CMD Task:[sudo apt search ros-base ] [-]Result:success d includes other basic non-robot tools like actionlib, dynamic reconfigure, nodelets, and pluginlib. 恭喜,成功添加ROS源,接下来可以使用apt安装ROS或者使用[1]一键安装ROS安装! Run CMD Task:[sudo apt search ros-base ] [-]Result:success d includes other basic non-robot tools like actionlib, dynamic reconfigure, nodelets, and pluginlib. RUN Choose Task:[请输入括号内的数字] 请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别): [1]:bouncy(ROS2) [2]:crystal(ROS2) [3]:dashing(ROS2) [4]:eloquent(ROS2) [5]:melodic(ROS1) [0]:quit 请输入[]内的数字以选择: -
@2805188071 在 一键安装里没有ros1可选项(20.04/18.04) 中说:
'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/dists/focal/InRelease Clearsigned file isn't valid, got 'NOSPLIT' (does the network require authentication?)\n", "E: The repository 'http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal InRelease' is not signed.
应该是这个问题
-
@2805188071 在 一键安装里没有ros1可选项(20.04/18.04) 中说:
pt更新失败,后续程序可能会继续尝试...,['\n', 'WARNING: apt does not have a stable CLI interface. Use with caution in scripts.\n', '\n', "E: Failed to fetch http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/dists/focal/InRelease Clearsigned file isn't valid, got 'NOSPLIT' (does the network require authentication?)\n", "E: The repository 'http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu focal InRelease' is not signed.\
@小伊 怎么解决
-
这个错误提示表明你在尝试通过
apt包管理器从清华大学(Tsinghua University)的ROS镜像源(mirrors.tuna.tsinghua.edu.cn/ros/ubuntu)更新或安装ROS 1时遇到了问题。错误指出InRelease文件验证失败,并且该仓库未签名。以下是几个可能的解决步骤:
-
检查网络连接:
确保你的网络连接是稳定的,并且没有需要认证的代理或VPN。 -
检查镜像源URL:
确认你添加的ROS仓库URL是否正确。对于ROS Melodic(通常与Ubuntu 18.04一起使用)和ROS Noetic(通常与Ubuntu 20.04一起使用),你应该使用正确的版本代号。 -
临时禁用该镜像源:
你可以临时从/etc/apt/sources.list或/etc/apt/sources.list.d/下的相关文件中注释掉或删除该镜像源,然后运行sudo apt update来尝试使用默认的Ubuntu仓库。 -
更换其他镜像源:
如果清华大学的镜像源有问题,你可以尝试更换为其他ROS镜像源,如ROS官方源或其他大学的镜像源。 -
清理APT缓存:
运行以下命令来清理APT缓存和修复软件包列表:sudo apt clean sudo apt autoclean sudo apt update --fix-missing -
手动下载并导入GPG密钥:
如果ROS仓库的GPG密钥没有正确导入,你可能需要手动下载并导入它。对于ROS的官方仓库,这通常可以在ROS的Wiki或安装指南中找到。 -
检查防火墙/安全设置:
确保没有任何防火墙或安全软件阻止了你对ROS仓库的访问。 -
使用
https而不是http:
尝试将仓库URL中的http更改为https,这可以提供更好的安全性,并可能解决某些连接问题。 -
检查系统时间:
确保你的系统时间是正确的,因为错误的系统时间可能会导致SSL证书验证失败。 -
尝试重新安装ROS:
如果以上步骤都无法解决问题,你可能需要完全卸载ROS,并重新按照官方安装指南进行安装。
在进行任何更改之前,请确保你备份了所有重要数据,并了解你正在执行的操作。如果你不确定某个步骤,最好先查阅相关文档或寻求社区帮助。
以上为生成回答,仅供参考~
-
-
@小鱼 谢谢小鱼,我看到‘apt does not have a stable CLI interface’警告之后把校园网换成了自己的热点,然后就成功出现ros1了,可能是我们学校的校园网有点bug与apt连接不稳定,现在已经解决!
-
2 2805188071 将这个主题转为问答主题,在
-
2 2805188071 将这个主题标记为已解决,在