wsl2下的通信如何实现
-
回复: [FishBot教程] 3. 主控板固件烧录与配置
我在使用wsl2下安装的ubuntu22.04+ros2 humble环境下,使用exe版本的烧录软件设置好了网络,并能在宿主机下ping通小车,但是在wsl2中无法ping通 -
在WSL2(Windows Subsystem for Linux 2)环境下使用Ubuntu 22.04与ROS2 Humble进行网络通信,特别是与硬件如小车进行通信时,可能会遇到一些网络隔离和配置问题。由于WSL2在Windows内核中运行Linux环境,它使用NAT(网络地址转换)和虚拟网络来隔离网络,这可能导致一些网络通信问题。以下是一些解决在WSL2中无法ping通小车的方法:
1. 确认网络设置
首先,确保你的WSL2实例已经正确配置了网络,并且能够访问外部网络。可以通过ping一些外部网站(如
ping google.com)来测试网络连通性。2. 检查防火墙和安全软件设置
确保Windows防火墙或其他安全软件没有阻止WSL2的网络通信。你可能需要在防火墙设置中添加允许WSL2网络通信的规则。
3. 使用WSL2的IP地址进行通信
由于WSL2使用NAT,你可能需要使用WSL2分配的特定IP地址来与宿主机或其他设备进行通信。你可以通过在WSL2终端运行
ip addr命令来查看你的IP地址。4. 配置WSL2的网络桥接
虽然WSL2默认使用NAT,但你可以尝试配置网络桥接以允许更直接的网络通信。不过,需要注意的是,WSL2本身并不直接支持网络桥接模式,这通常需要通过第三方工具或复杂的网络配置来实现。
5. 使用端口转发
如果小车仅监听宿主机上的特定端口,并且你需要从WSL2中访问该端口,你可以考虑在Windows上设置端口转发。这可以通过Windows的防火墙设置或使用第三方软件(如SSH隧道或netcat)来实现。
6. 检查小车的网络配置
确保小车的网络配置(如IP地址、子网掩码、网关等)与你的网络环境相匹配。如果小车配置了静态IP地址,请确保该地址在你的网络中是唯一的,并且可以被WSL2访问。
7. 使用ROS2的网络功能
由于你正在使用ROS2,可以利用ROS2提供的网络功能来简化通信过程。确保ROS2的配置文件(如
hosts文件或环境变量)包含了正确的网络地址和端口。8. 调试和日志记录
使用ROS2的日志记录功能来跟踪通信过程中的错误和警告。这可以帮助你识别问题所在,并采取相应的解决措施。
9. 查阅文档和社区资源
ROS2和WSL2都有丰富的文档和社区资源。如果你遇到特定的问题,可以查阅官方文档或在相关社区(如ROS论坛、GitHub问题等)中搜索解决方案或寻求帮助。
10. 重启WSL2和Windows
有时,简单的重启WSL2实例或整个Windows系统可以解决一些看似复杂的问题。
总之,解决在WSL2中无法ping通小车的问题可能需要综合考虑多个因素,包括网络配置、防火墙设置、ROS2配置以及小车的网络状态等。希望上述方法能对你有所帮助。
以上为生成回答,仅供参考~
-
@948947792 wsl 应该共用的宿主机ip,你是怎么个网络结构呢,小车物理层如何和电脑连接的
-
@小鱼 谢谢大佬解答,我现在在wsl里面使用docker拉取了配置助手,并都配置好了,但是ros2 topic list里面仅仅出现了/parameter_events,/rosout这两个话题,不知道这算不算已经弄好了

-
图片如下

ros2 topic list 的结果

-
@948947792 主要问题就是在wsl中使用ip -4 a | grep inet看电脑的ip地址时,输出入下

不知道该选择哪个地址了,然后在宿主机中使用 ipconfig得到
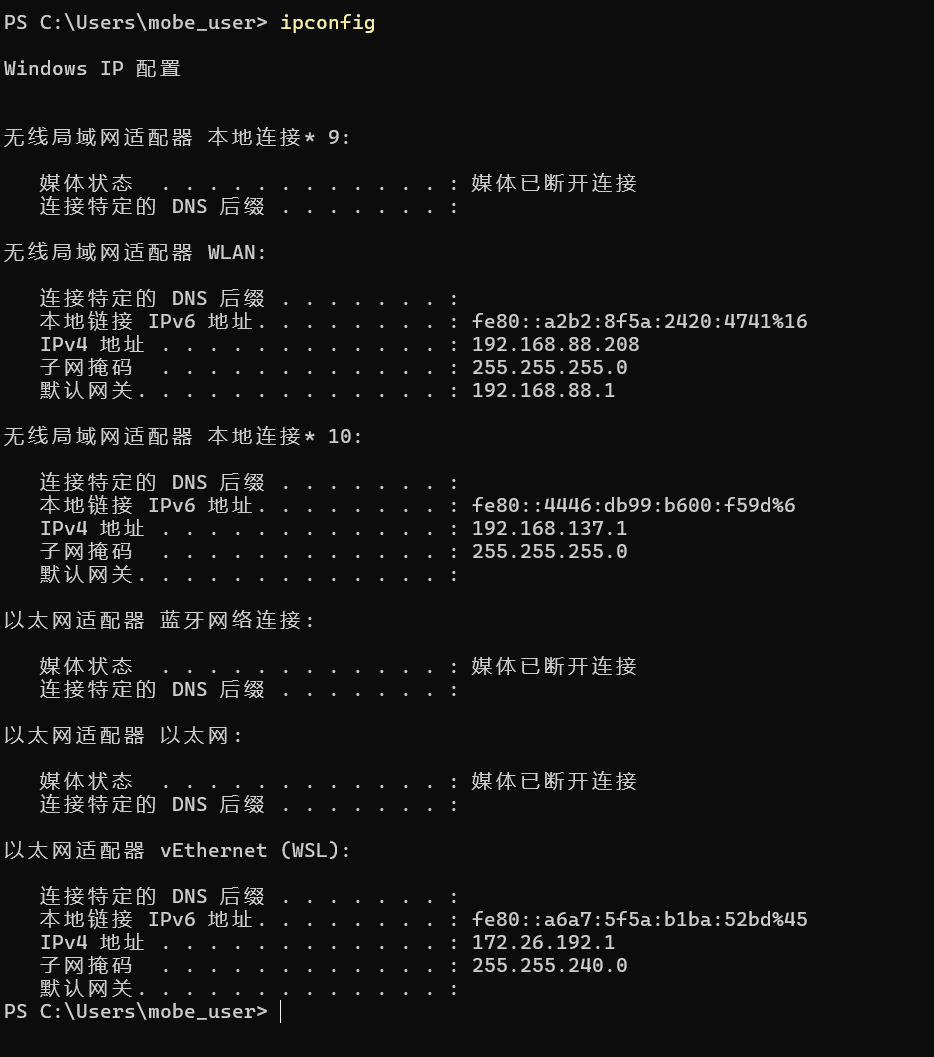
-
@948947792 现在的网络是由电脑热点实现的,因为没有路由器,想着先拿电脑热点试试,小车采用usb线与电脑连接
-
@948947792 热点大概率穿不透到docker内部网络,两个ip不在一个网段
-
请问有解决问题吗?我也发现ros2或者ros不能收到远端topic的问题,但是如果有rosbag包在本地播放的话就没问题。
-
@wuhanros 请问有解决吗?我最近也在使用wsl2安装ubuntu22.04+ros2和小车通讯,发现wsl2的ros2无法接收到小车节点发布的内容,但是换成ubunt22.04实体机可以。
-
@1253024365 把网络结构和ip搞出来看看,另外你用docker还是手动构建的
-
@小鱼 感谢您的回复,已解决。使用wsl2时需要与主机做一个镜像模式网络才行,结合wsl2官网的指示与sudo gedit ~/.bashrc
添加export ROS_HOSTNAME=192.168.xx.xxx
export ROS_MASTER_URI=http://192.168.xx.xxx:11311的方法解决了wsl2与ubuntu实体机无法通讯的问题。 -
@1253024365 您好,能详细说下解决方案吗,wsl下和ubuntu主机下都要设置吗,ROS_HOSTNAME 设置的是wsl的ip还是宿主机的ip?