用fishbot实体小车运行nav2导航时,设定目标点一直显示已到达
-
环境是双系统下的ubuntu22 ,网络是2.4G无线网!
-
@1281857896 地图是用gmapping建图建的
-
当您在使用基于ROS(Robot Operating System)的导航包nav2来控制fishbot实体小车,并遇到设定目标点后一直显示已到达(即使小车实际上并未到达该点),这可能是由于多种原因导致的。以下是一些排查和解决此问题的步骤:
-
检查地图和定位:
- 确保您的地图(通常是
.yaml或.pgm格式)是准确的,并且小车的实际位置与地图中的位置相匹配。 - 检查小车的定位系统(如激光雷达、视觉里程计等)是否工作正常,并且能够准确地估计小车的位姿。
- 确保您的地图(通常是
-
检查传感器数据:
- 查看传感器(如激光雷达、摄像头等)的原始数据,确保它们没有受到干扰或遮挡。
- 如果使用激光雷达,检查其扫描范围是否足够覆盖到目标点。
-
检查网络延迟和稳定性:
- 尽管您提到使用的是2.4G无线网,但无线网络可能会引入延迟和不稳定因素。尝试使用有线连接,看看是否有所改善。
- 如果必须使用无线,请确保网络环境稳定,并尽量减少其他设备的干扰。
-
检查nav2配置:
- 仔细检查nav2的配置文件(如
amcl_localization.yaml,move_base.yaml等),确保参数设置正确。 - 特别注意与目标点设定和到达判定相关的参数,如容忍度(tolerance)设置。
- 仔细检查nav2的配置文件(如
-
日志和调试:
- 查看ROS的日志输出,寻找可能的错误或警告信息。
- 使用
rostopic echo命令查看相关主题的实时数据,如/odom(里程计数据)、/amcl_pose(定位信息)等。 - 使用
rviz可视化工具来实时观察小车的状态和路径规划情况。
-
软件和固件更新:
- 确保ROS和nav2的版本是最新的,或者至少是稳定版本。
- 检查小车的固件(如电机控制、传感器驱动等)是否需要更新。
-
物理环境检查:
- 检查小车是否有任何机械故障,如轮子打滑、电机故障等。
- 确保小车行驶的路径上没有障碍物或干扰物。
-
社区和文档:
- 查阅ROS和nav2的官方文档,看看是否有类似问题的解决方案。
- 在ROS的社区论坛(如ROS Answers、GitHub Issues等)中搜索或提问,可能有其他用户遇到过类似问题。
通过以上步骤,您应该能够定位并解决小车在nav2导航中遇到的问题。如果问题仍然存在,可能需要更深入地分析具体的硬件或软件配置。
以上为生成回答,仅供参考~
-
-
@小鱼 这个怎么办呢应该
-
@1281857896 地图太乱了,建议先用配套的建图方法建立一张干净点的地图
-
@小鱼 我之前就是用的配套建图方法,小车底盘跑的是第 16 章 移动机器人控制系统搭建 中发布里程计那儿的程序。雷达用的docker,然后用那个建图方法,经常碰到障碍物就直接完蛋了,我手动拿开也没用,怎么操作也改变不了小车的运动状态,只能按原来的速度原地打转。导致一直建不了图
-
@1281857896 这个说起来,大概率是网络问题,可以描述下你所采用的网络结构吗
-
@小鱼 校园网插路由器引出来的2.4G网络
-
@1281857896 虚拟机实体机,ping延时多少
-
@小鱼 我是双系统,没有虚拟机
-
@小鱼 我觉得像是坐标变换时间戳对不上,但是不知道具体怎么查,怎么搞
-
@1281857896 等会我运行以下,发具体报错信息
-
@1281857896
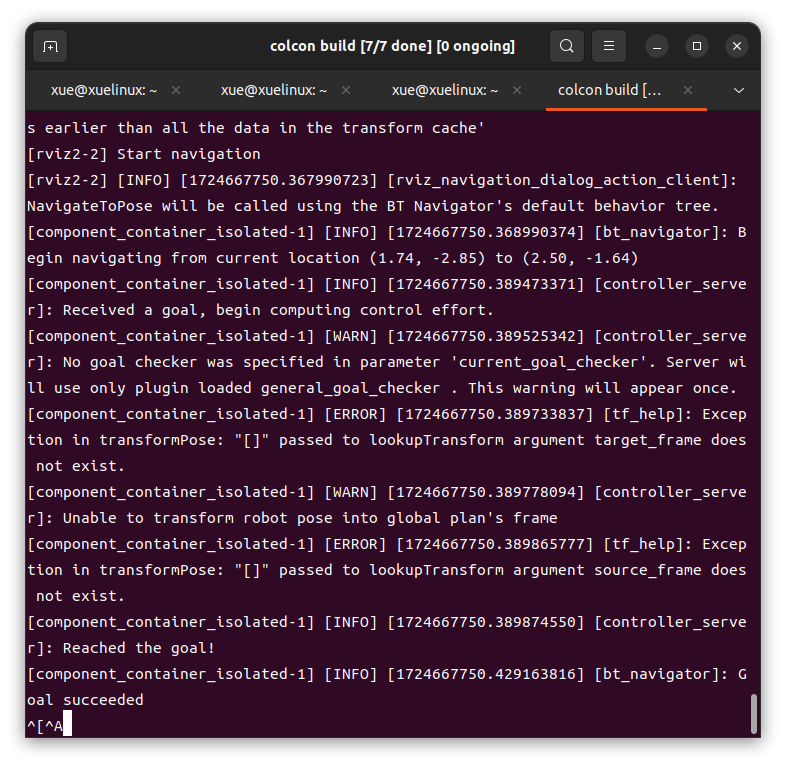 图上提示开始计算,然后说target_frame不存在
图上提示开始计算,然后说target_frame不存在 -
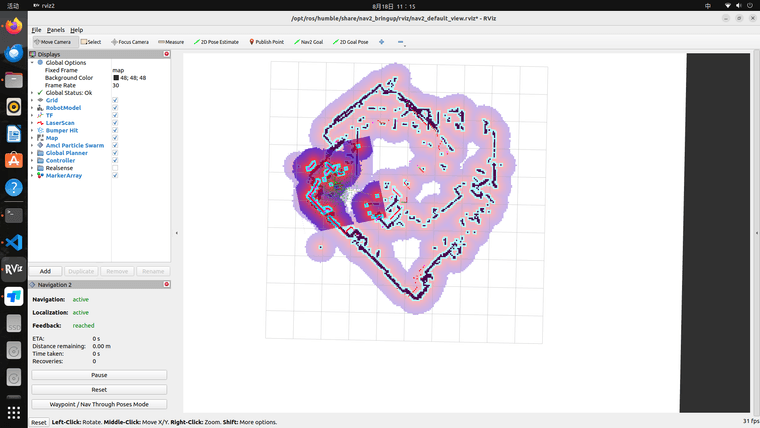
@1281857896
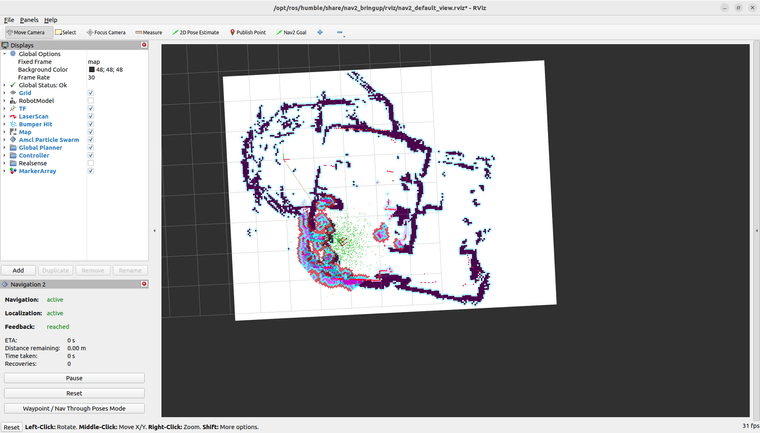 建的图长这样,因为环境问题,只能建成这种效果了,但是应该不影响到达很空旷的地方吧
建的图长这样,因为环境问题,只能建成这种效果了,但是应该不影响到达很空旷的地方吧 -
@1281857896 应该是不影响,从电脑到小车的ping延迟是多少