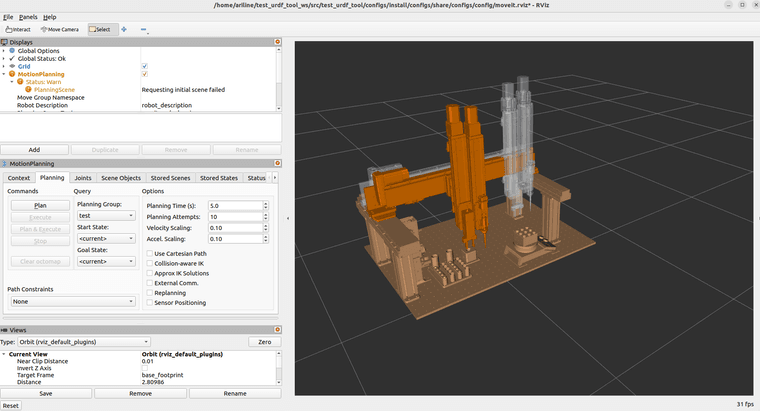
moveit_setup_assistent得出的结果在尝试demo.launch.py时不能正常路径规划,警告,并在尝试改Global参数为baselink时闪退
-
-
当使用 MoveIt! 的 Setup Assistant 配置机器人并尝试运行
demo.launch.py时遇到路径规划失败、警告或程序崩溃的问题,这通常与多个配置或代码实现细节有关。以下是一些可能的解决步骤和检查点:-
检查URDF/Xacro文件:
- 确保你的机器人模型(URDF或Xacro文件)是正确的,并且所有关节、连杆和传感器都已正确配置。
- 检查是否有任何关节或连杆缺少惯性参数,这可能会影响动力学仿真和路径规划。
-
检查MoveIt!配置:
- 使用MoveIt! Setup Assistant时,确保正确设置了所有必要的参数,如规划组、机器人状态、运动学求解器等。
- 检查是否选择了正确的机器人基座(base_link 或 base_frame),这通常在设置机器人状态时指定。
-
检查Global Planner参数:
- 如果在修改Global Planner参数(如从
world更改为base_link)后出现问题,确保这是正确的。通常,全局规划器应该使用相对于固定框架(如world)的坐标。 - 检查
demo.launch.py文件中是否有硬编码的框架名称,这些名称可能需要更新以匹配你的配置。
- 如果在修改Global Planner参数(如从
-
查看ROS日志和警告:
- 运行
roslaunch时,使用--screen选项来保持控制台输出,这样你可以看到完整的错误和警告信息。 - 检查日志中是否有关于路径规划失败、碰撞检测、关节限制或运动学求解器问题的详细信息。
- 运行
-
检查环境配置:
- 确保你的工作空间已正确设置,并且所有必要的依赖项都已安装。
- 检查ROS版本是否与MoveIt!的版本兼容。
-
- 如果
demo.launch.py是自定义的,请确保它正确加载了MoveIt!的配置文件(如moveit_config/moveit_planning_execution.launch)。 - 检查是否有任何路径或文件名错误。
- 如果
-
尝试使用rviz和MoveIt!插件:
- 使用rviz和MoveIt!的插件(如MotionPlanning、State Visualization等)手动检查和调整规划设置。
- 这可以帮助你更直观地看到规划过程中的问题所在。
-
查看社区和文档:
- 搜索是否有其他用户遇到类似问题,并查看他们的解决方案。
- 查阅MoveIt!的官方文档和教程,以获得更多关于配置和故障排除的信息。
-
简化问题:
- 尝试使用一个简单的机器人模型和场景来测试你的配置,以确定问题是否与机器人模型的复杂性或特定场景有关。
如果以上步骤都无法解决问题,可能需要更深入地检查你的机器人模型和MoveIt!配置,或者考虑在MoveIt!社区或相关论坛上寻求帮助。
以上为生成回答,仅供参考~
-
-
@ariline
报错:
[rviz2-3] [INFO] [1724236859.341263612] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
[rviz2-3] [INFO] [1724236859.341592941] [moveit_ros_visualization.motion_planning_frame]: group test
[rviz2-3] [INFO] [1724236859.341605265] [moveit_ros_visualization.motion_planning_frame]: Constructing new MoveGroup connection for group 'test' in namespace ''
[ERROR] [move_group-2]: process has died [pid 13221, exit code -6, cmd '/opt/ros/humble/lib/moveit_ros_move_group/move_group --ros-args --params-file /tmp/launch_params_kytp92dn --params-file /tmp/launch_params_nnxlqnkk'].
[rviz2-3] [INFO] [1724236919.368794395] [move_group_interface]: Ready to take commands for planning group test.
[rviz2-3] [INFO] [1724237328.449671049] [interactive_marker_display_103258718664464]: Target frame is now base_link
[ERROR] [rviz2-3]: process has died [pid 13223, exit code -11, cmd '/opt/ros/humble/lib/rviz2/rviz2 -d /home/ariline/test_urdf_tool_ws/src/test_urdf_tool/configs/install/configs/share/configs/config/moveit.rviz --ros-args --params-file /tmp/launch_params_075jsll7 --params-file /tmp/launch_params_qt3y5x3g']. -
Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
从这句话入手,启动move_group了吗?
@小伊 翻一下
-
从这句话“Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?”来看,它表明在尝试调用
get_planning_scene服务时失败了,并询问是否已经启动了move_group节点或者调用了psm.providePlanningSceneService()方法来提供规划场景服务。翻译这句话:
“调用get_planning_scene服务失败,您是否已经启动了move_group或者调用了psm.providePlanningSceneService()?”关于启动move_group的说明:
这句话提示了一个常见的问题,即当你尝试与ROS(Robot Operating System)中的move_group节点进行交互时,但move_group服务尚未启动或未正确配置。move_group是ROS中用于机器人路径规划和运动控制的核心组件之一,它提供了许多服务,包括获取和更新规划场景(planning scene)的服务。如果你遇到了这个错误,你需要检查以下几点:
-
确保move_group节点已启动:这通常通过运行一个启动文件来完成,该文件会加载所有必要的配置文件并启动
move_group节点。你可以在你的ROS工作空间的launch文件夹中找到这样的文件,或者使用ROS的roslaunch命令来启动它。 -
检查ROS节点列表:使用
rostopic list和rosservice list命令来查看是否有move_group相关的服务和话题在运行。 -
检查配置文件:确保
move_group的配置文件(如URDF或Xacro文件)已正确设置,并且move_group节点能够加载和使用这些文件。 -
环境设置:确保你的ROS环境变量(如
ROS_PACKAGE_PATH)设置正确,以便ROS能够找到你的工作空间和所有必要的包。 -
调用psm.providePlanningSceneService():如果你的代码或应用是手动设置规划场景服务的,确保你调用了
psm.providePlanningSceneService()或类似的函数来启动这个服务。然而,这通常是在开发自定义节点或服务时考虑的,对于标准的move_group使用,这不是必需的。
总之,这句话提示你需要检查
move_group节点是否已正确启动和配置,以便能够调用get_planning_scene服务。
以上为生成回答,仅供参考~
-