使用launch文件启动了2个节点,但马上会自动关闭这2个节点,为什么?
-
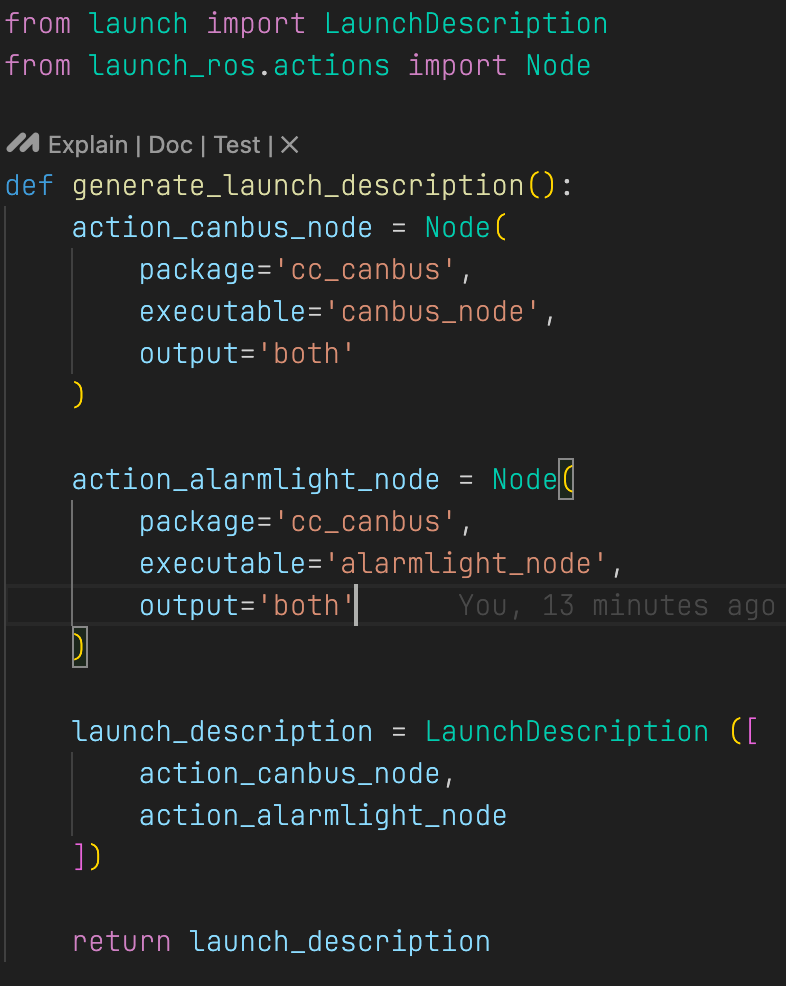
launch文件:
运行结果:

-
当你遇到使用ROS的
launch文件启动节点后,这些节点又立即自动关闭的情况时,可能有几个原因。下面是一些常见的问题排查步骤和可能的原因:-
节点代码中的错误:
- 检查你的节点代码是否包含任何会导致程序立即退出的错误(如未捕获的异常、逻辑错误等)。
- 确保所有依赖都正确安装,并且节点能够访问所有必要的资源(如文件、网络等)。
-
ROS环境配置问题:
- 确保你的ROS环境已经正确设置,包括ROS_PACKAGE_PATH、ROS_MASTER_URI等环境变量。
- 检查是否有多个ROS主节点(master)运行,这可能会导致通信问题。
-
launch文件配置错误:
- 检查你的
launch文件是否有语法错误。 - 确保所有节点名、包名、可执行文件名等都是正确的,没有拼写错误。
- 检查是否有必要的参数被遗漏或错误地设置。
- 检查你的
-
依赖关系问题:
- 如果你的节点依赖于其他服务或话题的发布,确保这些依赖在节点启动前已经就绪。
- 使用
<rosparam>、<rosparam file="...">等标签来设置必要的参数。
-
资源限制:
- 检查系统是否有足够的资源(如CPU、内存)来运行这些节点。
- 查看系统日志或ROS日志(使用
roscore启动时的终端输出或roscd到你的包下查看logs目录)来查找可能的错误或警告信息。
-
调试方法:
- 尝试单独运行这些节点(不使用
launch文件),看看是否还会发生同样的问题。 - 使用
rosnode info <node_name>来检查节点的状态。 - 使用
rosrun或直接在终端中运行Python脚本来测试节点是否能单独运行。 - 查看节点的输出日志,了解在关闭前是否有任何有用的错误信息。
- 尝试单独运行这些节点(不使用
-
查看ROS Master的日志:
- ROS master的日志中可能包含关于节点注册、通信错误或其他相关问题的有用信息。
-
网络问题:
- 如果你的ROS系统跨越了多个网络或机器,检查网络连接和配置。
通过上述步骤,你应该能够诊断并解决节点自动关闭的问题。如果问题仍然存在,你可能需要更详细地检查节点的实现细节或寻求来自ROS社区的帮助。
以上为生成回答,仅供参考~
-
-