ROS2 调用rclcpp库时报错,显示rclcpp库中无Node类
-
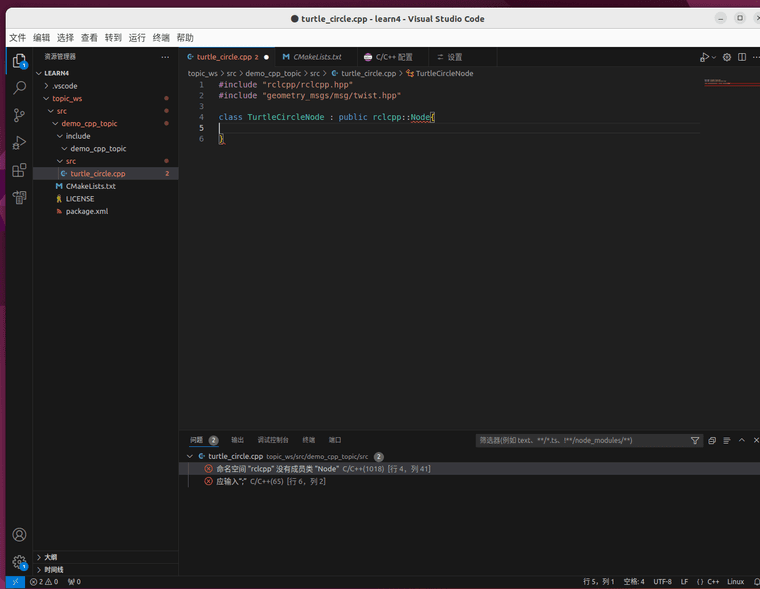
照着小鱼《ROS 2机器人开发从入门到实践》3.3.1发布速度控制海龟画圆中来的,
依赖项什么的也加了,库也包含进去了,大佬求解 -
当你在使用ROS 2并尝试通过
rclcpp库中的Node类创建节点时遇到“rclcpp库中无Node类”的错误,这通常是由以下几个原因造成的:-
依赖未正确安装或配置:
确保你已经正确安装了ROS 2和所有相关的依赖项。你可以通过ROS 2的包管理器(如apt对于Ubuntu系统)来安装rclcpp和其依赖项。对于大多数ROS 2发行版,rclcpp是作为核心组件自动安装的。sudo apt update sudo apt install ros-<distro>-rclcpp其中
<distro>应该替换为你的ROS 2发行版名称,如foxy、galactic等。 -
CMakeLists.txt或package.xml配置问题:
你的CMakeLists.txt文件需要正确链接rclcpp库。确保你的find_package(rclcpp REQUIRED)调用在添加可执行文件或库之前。同时,你的package.xml文件需要声明对rclcpp的依赖。CMakeLists.txt示例:cmake_minimum_required(VERSION 3.0.2) project(my_ros2_package) # 查找依赖项 find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) # 添加可执行文件 add_executable(my_node src/my_node.cpp) ament_target_dependencies(my_node rclcpp) # 包含rclcpp的头文件 target_include_directories(my_node PRIVATE ${rclcpp_INCLUDE_DIRS}) target_link_libraries(my_node PRIVATE ${rclcpp_LIBRARIES}) ament_package()package.xml示例:<package format="3"> <name>my_ros2_package</name> <version>0.0.1</version> <maintainer email="you@example.com">Your Name</maintainer> <license>BSD-3-Clause</license> <buildtool_depend>ament_cmake</buildtool_depend> <depend>rclcpp</depend> <exec_depend>rclcpp</exec_depend> <test_depend>test_depend1</test_depend> <test_depend>test_depend2</test_depend> <export> <build_type>cmake</build_type> </export> </package> -
编译和构建问题:
确保你使用colcon或ament build来构建你的ROS 2包,而不是使用catkin_make或cmake(尽管对于简单的CMake项目,直接使用cmake可能也有效,但通常建议使用ROS 2的构建系统)。colcon build --packages-select my_ros2_package -
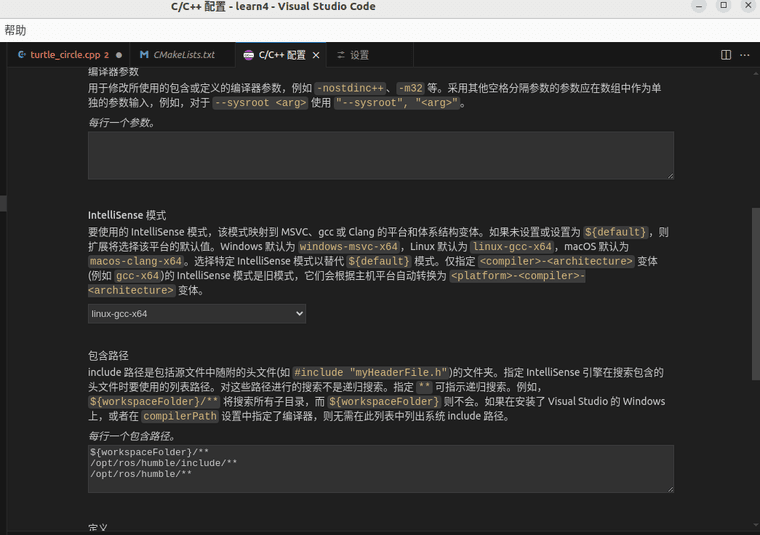
IDE配置问题:
如果你在使用IDE(如Visual Studio Code, CLion等),确保你的项目配置正确,包括CMake和ROS 2的路径设置。 -
检查代码错误:
确保你的代码中确实包含了rclcpp/rclcpp.hpp,并且正确地使用了rclcpp::Node。#include <rclcpp/rclcpp.hpp> int main(int argc, char **argv) { rclcpp::init(argc, argv); auto node = std::make_shared<rclcpp::Node>("my_node"); RCLCPP_INFO(node->get_logger(), "Hello, ROS 2!"); rclcpp::spin(node); rclcpp::shutdown(); return 0; }
如果以上都检查过了还是有问题,建议检查ROS 2的文档或搜索是否有其他人遇到并解决了相同的问题。你也可以在ROS 2的官方论坛或GitHub仓库中提问。
以上为生成回答,仅供参考~
-
-
-
@yux0825 在 ROS2 调用rclcpp库时报错,显示rclcpp库中无Node类 中说:
照着小鱼《ROS 2机器人开发从入门到实践》3.3.1发布速度控制海龟画圆中来的,
依赖项什么的也加了,库也包含进去了,大佬求解一个简单的方式是给vscode安装cmake插件,直接加载cmake工程。
-
我也是这个问题,楼主解决了吗