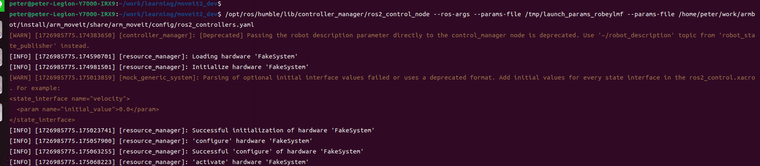
参考教程自己用开源dofbot写的moveit,启动demo后,ros2_control_node就会挂掉
-
求大佬们帮忙看看...
启动后就会挂掉,后边rviz中就显示不对了

但是手动把这个拷贝出来后,又是可以执行的
-
遇到使用
ros2_control和moveit2结合时ros2_control_node崩溃的问题,通常可能由几个不同的原因引起。以下是一些排查和解决此问题的步骤:1. 检查日志
首先,查看
ros2_control_node崩溃时的详细日志。你可以通过ros2 run命令的--log-level选项来设置更高的日志级别(如DEBUG或INFO),以获取更多信息。例如:ros2 run your_package ros2_control_node --log-level DEBUG检查日志中是否有具体的错误消息或异常堆栈,这些信息通常可以指出问题所在。
2. 确认配置文件
检查
ros2_control的配置文件(如hardware_description.yaml和controllers.yaml),确保所有参数都是正确的,并且与你的硬件和实际设置相匹配。错误的参数或配置可能会导致节点崩溃。3. 依赖和版本
确保你安装的
ros2_control、moveit2和其他相关包的版本是兼容的。有时候,不同版本的包之间可能存在不兼容的问题。你可以考虑更新或降级某些包来解决这个问题。4. 权限问题
确保运行 ROS 2 节点的用户有足够的权限访问和控制硬件设备。权限不足也可能导致节点崩溃。
5. 环境问题
检查你的 ROS 2 环境设置是否正确。包括环境变量(如
ROS_DOMAIN_ID)、工作空间路径等。6. 隔离测试
由于你提到手动拷贝后可以执行,这可能是环境或启动脚本中的某个特定问题。尝试在一个干净的环境中(例如新的 ROS 2 工作空间)重新构建和运行你的代码,以排除其他干扰因素。
7. 调试
如果以上步骤都不能解决问题,你可以尝试使用调试工具(如 GDB)来运行
ros2_control_node,以获取更深入的崩溃信息。你可以通过以下方式启动 GDB 调试:gdb --args ros2 run your_package ros2_control_node在 GDB 中,你可以设置断点、单步执行代码、查看变量等,以帮助你定位问题。
8. 寻求社区帮助
如果以上步骤都不能解决你的问题,你可以考虑在 ROS 2 的官方论坛、GitHub 问题跟踪器或相关社区中寻求帮助。提供详细的错误日志、你的配置文件和任何可能相关的代码片段,这将有助于其他开发者理解你的问题并提供帮助。
希望这些步骤能帮助你解决
ros2_control_node崩溃的问题!
以上为生成回答,仅供参考~
-
-
@小鱼 嗯嗯,好的大佬。 问题查到啦,是显示输出的问题,修改了ros_control的代码就好啦