move it task constructor的规划结果与实际执行结果(gazebo环境下执行)不完全一致
-
环境:
ros2版本:humble gazebo版本:fortress
问题描述:
我利用moveit task constructor(MTC)实现一个pick place demo。MTC成功给出了一个规划结果。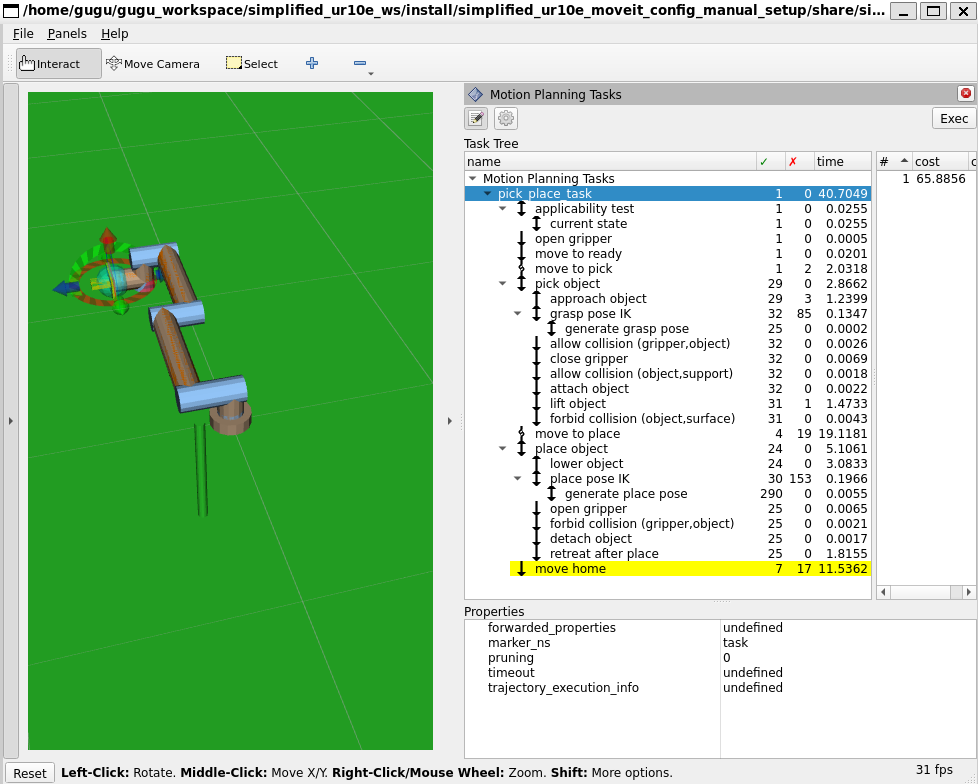
但是当我点击execute时,在gazebo中的实际执行结果与MTC演示的规划结果并不完全一致。gazebo中实际执行时,似乎并不是严格按照一个stage执行完毕之后,再开始执行下一个stage。而是一个stage还没有执行完全到位后,就开始执行下一个stage了,这最终导致了抓取任务失败。
比如,理论上应该是机械臂先执行完到达预定抓取位置的stage后(也就是图中的move to pick子阶段),再执行沿直线接近物体的approach object阶段,之后再close gripper。
但实际执行时,机械臂还未完全到达预定抓取位置,就以及开始向物体接近了,同步还执行了close gripper的动作。
但是当我分步单个执行各子阶段任务时,是可以完整执行完每个子任务的,最终也可以成功完成pick place任务。所以想请问各位大佬,可能是哪里出了问题,导致执行完整任务时,会出现这样的现象。会是ros2 controller的问题吗?
-
在ROS2(Humble)和Gazebo(Fortress)环境下使用MoveIt Task Constructor(MTC)时遇到规划结果与实际执行结果不一致的问题,可能由多种因素导致。以下是一些可能的原因及相应的解决策略:
1. 控制器配置问题
问题描述:
- 控制器配置可能未正确设置,导致在执行时未能严格遵循规划的各个阶段。
解决策略:
- 检查ROS2控制器的配置,确保每个阶段的控制逻辑正确无误。
- 确保控制器的执行顺序与MTC规划的阶段顺序一致。
- 如果使用状态机或行为树控制机械臂,检查其转换条件和逻辑是否正确。
2. 执行时间或速度设置
问题描述:
- 执行时间或速度设置不当,可能导致阶段之间的切换过于迅速,未能充分完成前一阶段的动作。
解决策略:
- 调整控制器的执行速度或加速度参数,确保机械臂有足够的时间完成每个动作。
- 在MTC的规划中,可以设置每个阶段的执行时间或速度限制,以确保动作的准确性。
3. 传感器反馈与闭环控制
问题描述:
- 如果机械臂在执行过程中依赖于传感器反馈进行闭环控制,那么传感器数据的准确性和实时性将直接影响执行结果。
解决策略:
- 检查传感器(如编码器、力传感器等)的校准和连接状态,确保数据准确。
- 优化控制算法,提高对传感器数据的处理和响应速度。
4. 同步与通信问题
问题描述:
- ROS2节点之间的通信延迟或不同步可能导致执行结果偏离规划。
解决策略:
- 检查ROS2网络的配置和性能,确保通信的实时性和可靠性。
- 使用ROS2的调试工具(如ros2 topic list, ros2 node info等)来监控节点状态和通信情况。
5. 动力学与物理仿真差异
问题描述:
- Gazebo中的物理仿真可能与实际机械臂的动力学特性存在差异,导致执行结果不一致。
解决策略:
- 调整Gazebo中的物理参数(如质量、惯性、摩擦系数等),以更准确地模拟实际机械臂的行为。
- 进行多次仿真测试,观察并分析执行结果的差异,逐步优化参数设置。
6. 软件与库版本兼容性问题
问题描述:
- ROS2和Gazebo的不同版本之间可能存在兼容性问题,影响执行结果。
解决策略:
- 检查ROS2和Gazebo的版本兼容性,确保使用的版本相互兼容。
- 如有必要,尝试升级或降级ROS2和Gazebo的版本。
总结
针对您遇到的问题,建议从控制器配置、执行时间/速度设置、传感器反馈、同步与通信、动力学仿真以及软件版本兼容性等方面进行全面检查和优化。同时,也可以考虑在ROS2社区或相关论坛中寻求更专业的帮助和解决方案。
以上为生成回答,仅供参考~
-